Motion State Instructions
72 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
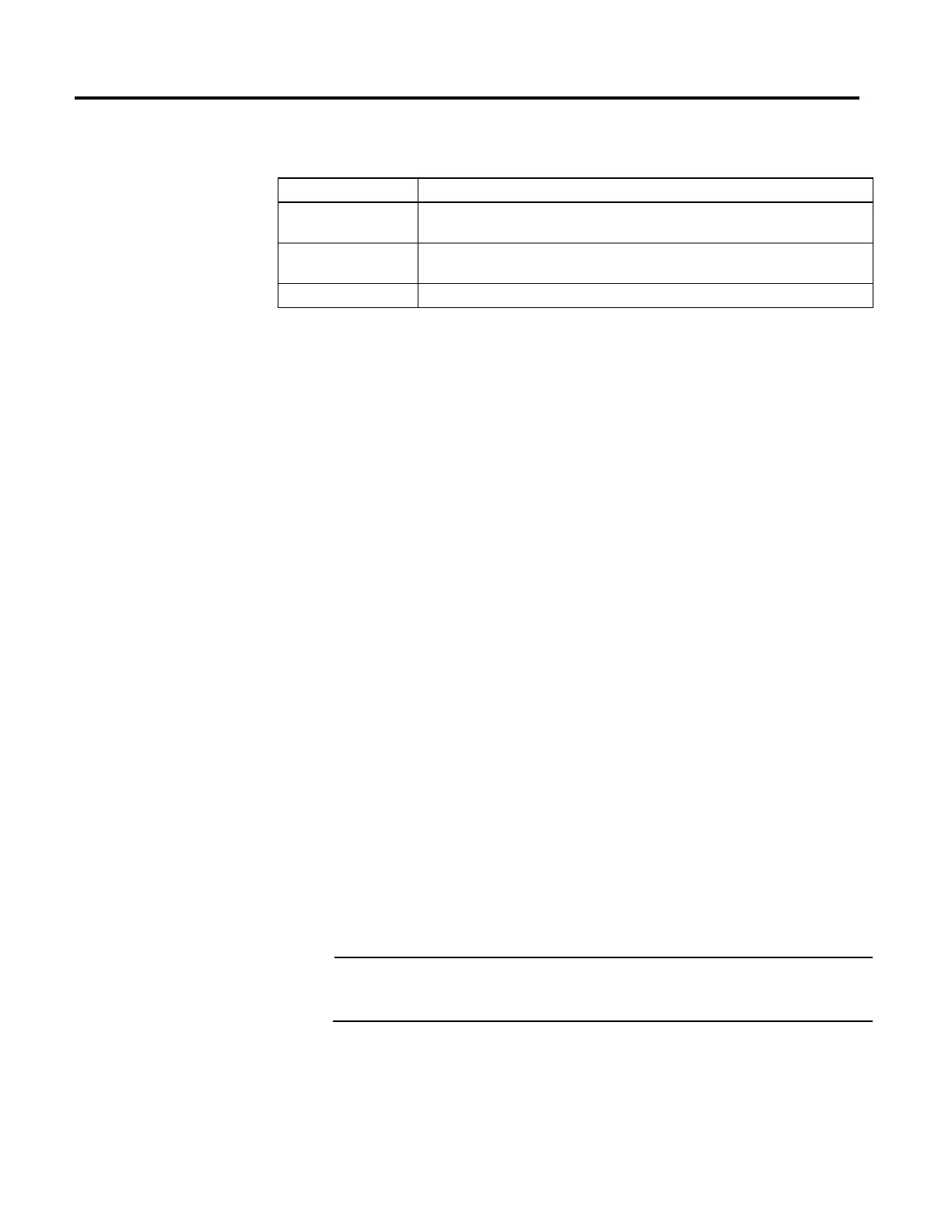
MOTION_INSTRUCTION Structure
Mnemonic Description
.EN (Enable) Bit 31 It is set when the rung makes a false-to-true transition and remains set until the servo message
transaction is completed and the rung goes false.
.DN (Done) Bit 29 It is set when the axis’ servo action has been successfully disabled and the drive enable and servo active
status bits have been cleared.
.ER (Done) Bit 28 It is set to indicate that the instruction detected an error, such as if you specified an unconfigured axis.
Description
The MSF instruction directly and immediately turns off drive output and disables
the servo loop on any physical servo axis. With non-CIP motion, this places the
axis in the Axis Ready state described in Motion State Instructions. With CIP
motion, this places the axis in the Stopped state described in Motion State
Instructions. The MSF instruction also disables any motion planners that may be
active at the time of execution. The MSF instruction requires no parameters –
simply enter or select the desired axis.
If the targeted axis does not appear in the list of available axes, the axis has not
been configured for operation. Use the Tag Editor to create and configure a new
axis.
You can use the MSF instruction to turn servo action off when you must move the
axis by hand. Since the position continues to be tracked even with servo action off.
When the servo loop is turned on again, by the Motion Servo On (MSO)
instruction, the axis is again under closed-loop control, at the new position.
The axis stopping behavior varies depending upon the type of drive. In some cases
the axis coasts to a stop and in other cases the axis decelerates to a stop using the
drive’s available stopping torque.
For non-CIP motion, to execute an MSF instruction successfully, the targeted axis
must be configured as a Servo axis. If this condition is not met, the instruction errs.
If you have an Axis Type of Virtual the instructions errors because with a Virtual
Axis the servo action and drive enable status are forced to always be true. A
Consumed axis data type also errors because only the producing controller can
change the state of a consumed axis.
Important: The instruction execution may take multiple scans to execute because it requires multiple coarse updates
to complete the request. The Done (.DN) bit is not set immediately, but only after the request is
completed.
Additionally, for CIP motion, the MSF instruction supports canceling the Motion
Drive Start (MDS) instruction. This includes clearing the MDS In Process (.IP)
bit, and clearing the DirectVelocityControlStatus bit and the
DirectTorqueControlStatus bit in the Motion Status attribute.
 Loading...
Loading...







