88 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
MOTION_INSTRUCTION Structure
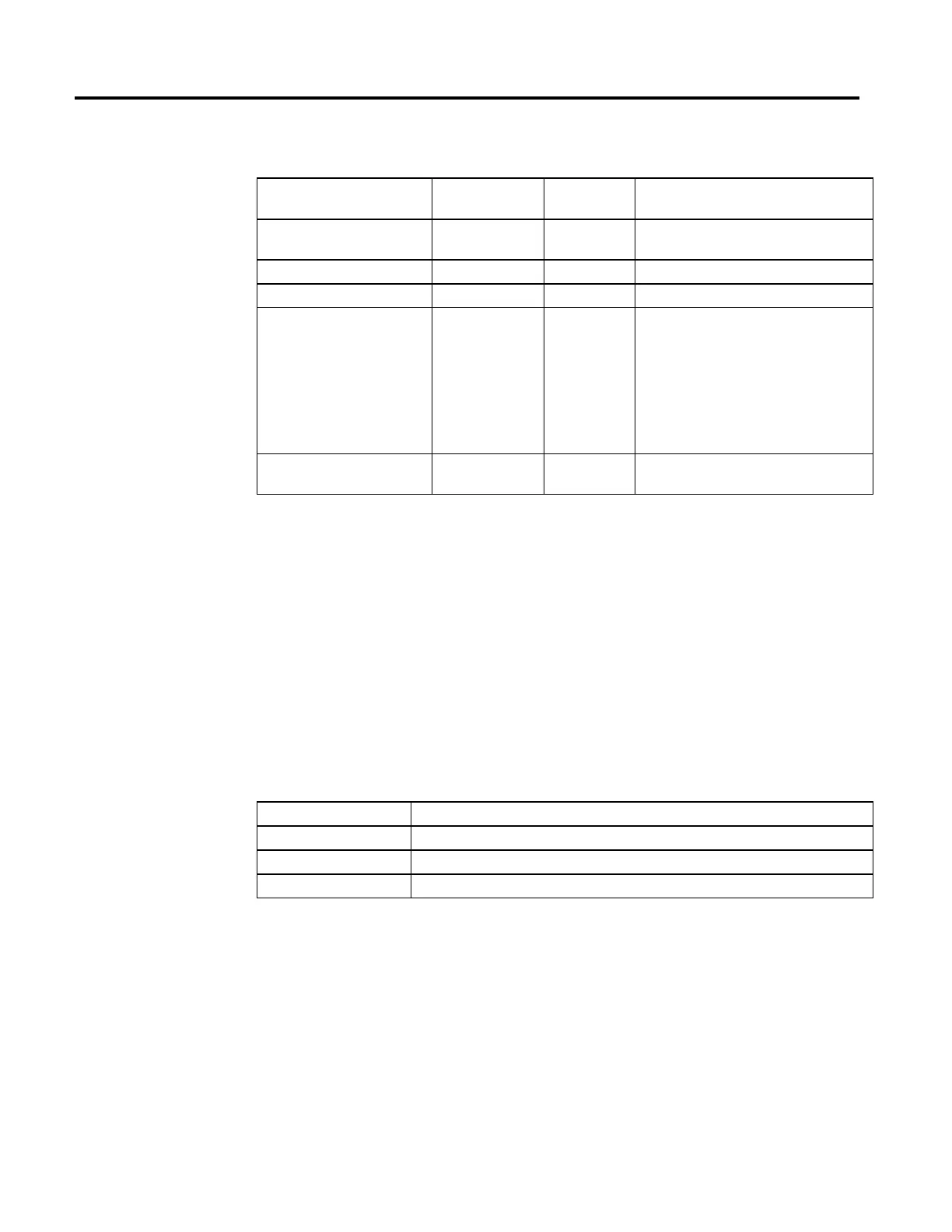
To See If Check To See If This
Bit Is Set To
Data Type Notes
A false-to-true transition caused the
instruction to execute.
EN BOOL The EN bit stays set until the process is complete and
the rung goes false.
The stop was successfully initiated. DN BOOL
An error happened. ER BOOL
The axis is stopping. IP BOOL Any of these actions end the MAS instruction and
clear the IP bit:
• The axis is stopped
• Another MAS instruction supersedes this MAS
instruction
• Shutdown command
• Fault Action
The axis is stopped. PC BOOL The PC bit stays set until the rung makes a
false-to-true transition.
Description
Use the MAS instruction when you want a decelerated stop for any controlled
motion in process for the axis. The instruction stops the motion without disabling
the servo loop. A trapezoidal profile is always used for MAS with Stop Type=ALL
for the deceleration regardless of the programmed profile type. Use the instruction
to:
• stop a specific motion process such as jogging, moving, or gearing
• stop the axis completely
• abort a test or tune process initiated by a Motion Run Hookup Diagnostics
(MRHD) instruction or Motion Run Axis Tuning (MRAT) instruction.
If the Stop Type is Then the MAS Instruction Uses This Profile
Jog Same type of profile as the Motion Axis Jog (MAJ) instruction that started the jog.
Move Same type of profile as the Motion Axis Move (MAM) instruction that started the move.
None of the above Trapezoidal.
When MAS ( Stop Type = All ) is used on any axis associated with a coordinate
system and a coordinated motion instruction is running on it, Coordinate system’s
maximum deceleration is used to stop remaining axes. If the coordinate system
contains orientation axes, Coordinate system’s Orientation maximum
deceleration is used for stopping remaining Rx, Ry or Rz axes.
 Loading...
Loading...







