90 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
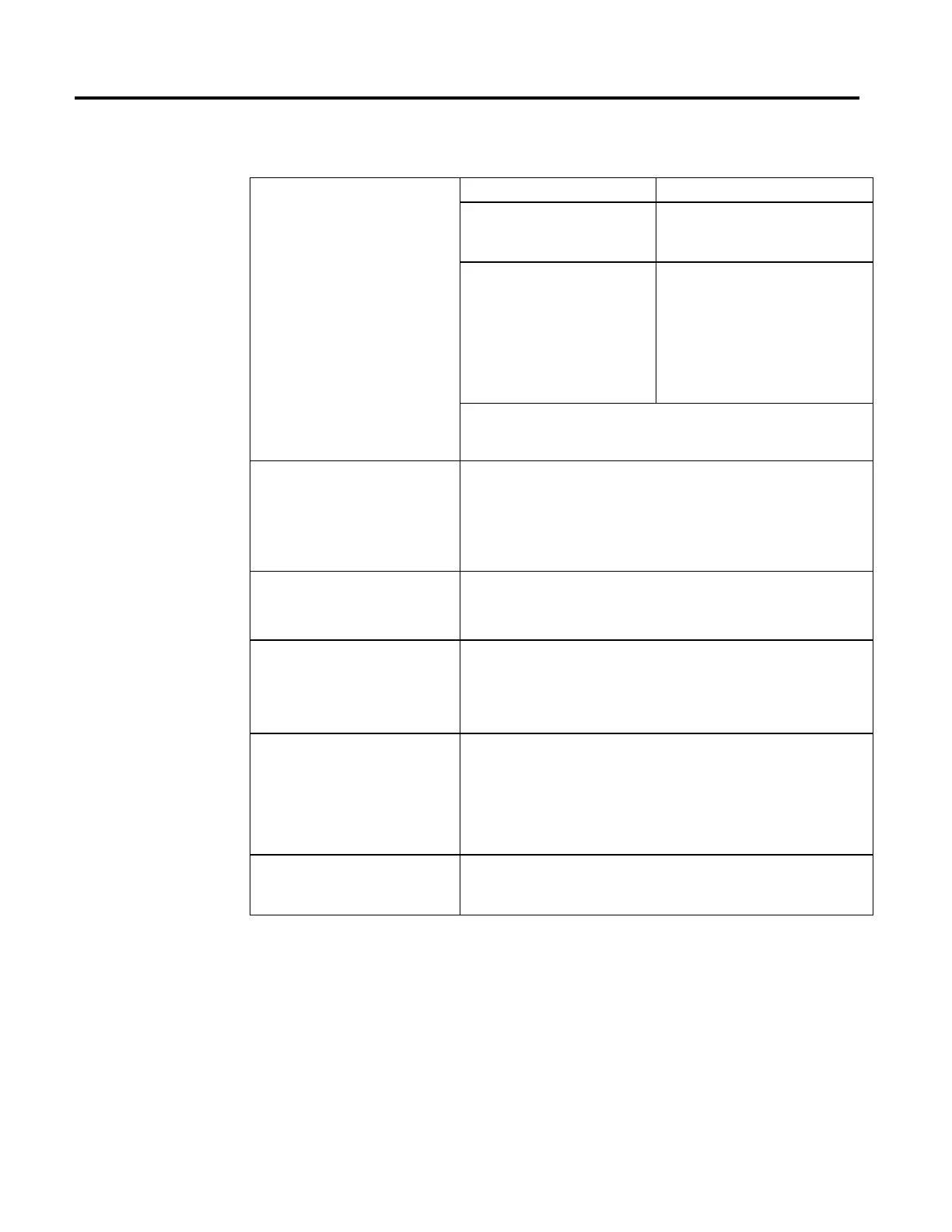
Choose whether to stop all motion or only a
specific type of motion.
If You Want to Stop Then Choose This Stop Type
All motion in process for this axis. All
The instruction uses a trapezoidal profile and
stops the axis.
Stop only a certain type of motion but
leave other motion processes running.
The type of motion that you want to stop
The axis could still be moving when the MAS
instruction is complete.
The instruction uses an S-curve profile to stop
the axis only if:
• The Stop Type is Jog or Move, and
• The jog or move used an S-curve profile.
Example: Suppose your axis is executing both a jog and a move at the same time. And
suppose you want to stop only the jog but leave the move running. In that case, choose a Stop
Type of Jog.
To stop gearing or camming, select the slave
axis.
To stop a gearing or position camming process, enter the slave axis to turn off the specific
process and stop the axis. If the master axis is a servo axis, you can stop the master axis which
in turn stops the slave without disabling the gearing or position camming.
Tip: If the Master axis is moved manually while the Master axis was in a disabled state, the
actual position of the slave axis continues to track the Master's position, regardless whether
the MasterReference of the MAPC instruction is set to Actual or Command.
To stop a Master Offset move, enter the slave
axis but use master units.
To stop an Absolute or Incremental Master Offset move:
• For Axis, enter the slave axis.
• For Deceleration and Jerk, enter the values and units for the master axis.
Be careful if the instruction changes motion
parameters.
When you execute an MAS instruction, the axis uses the new deceleration and jerk rates for
the motion that’s already in process. This can cause an axis to overshoot its speed, overshoot
its end position, or reverse direction. S-curve profiles are more sensitive to parameter
changes.
For more information, see Troubleshoot Axis Motion.
Use the jerk operands for S-curve profiles. Use the jerk operands when
• The Stop Type is Jog or Move.
• The jog or move uses an S-curve profile.
Under those conditions, the instruction uses an S-curve profile to stop the axis. The instruction
uses a constant deceleration rate for all other types of stops. You must fill in the jerk operands
regardless of the type of stop.
Use % of Time for the easiest programming
and tuning of jerk.
For an easy way to program and tune jerk, enter it as a % of the acceleration or deceleration
time.
For more information, see Tune an S-curve Profile.
Master Driven Speed Control (MDSC) and the MAS Instruction
If the MAS is executed (goes IP) on the Slave Axis in Master Driven Mode, the
MDSC link is immediately broken. The Slave always stops in Time Driven Mode,
regardless if the active mode is Time Driven or Master Driven.
 Loading...
Loading...







