CNC Setup Utility Manual
P/N 70000490C - Tuning the Current, Velocity, and Position Controller
All rights reserved. Subject to change without notice. 5-7
10-December-04
MC_2322: U Vel. Control Prop. Gain (mAs/rev)
MC_2323: U Vel. Control Integral Timecons (.1ms)
MC_2922: Spindle Vel. Control Prop. Gain (mAs/rev)
MC_2923: Spindle Vel. Control Integral Timecons (.1ms)
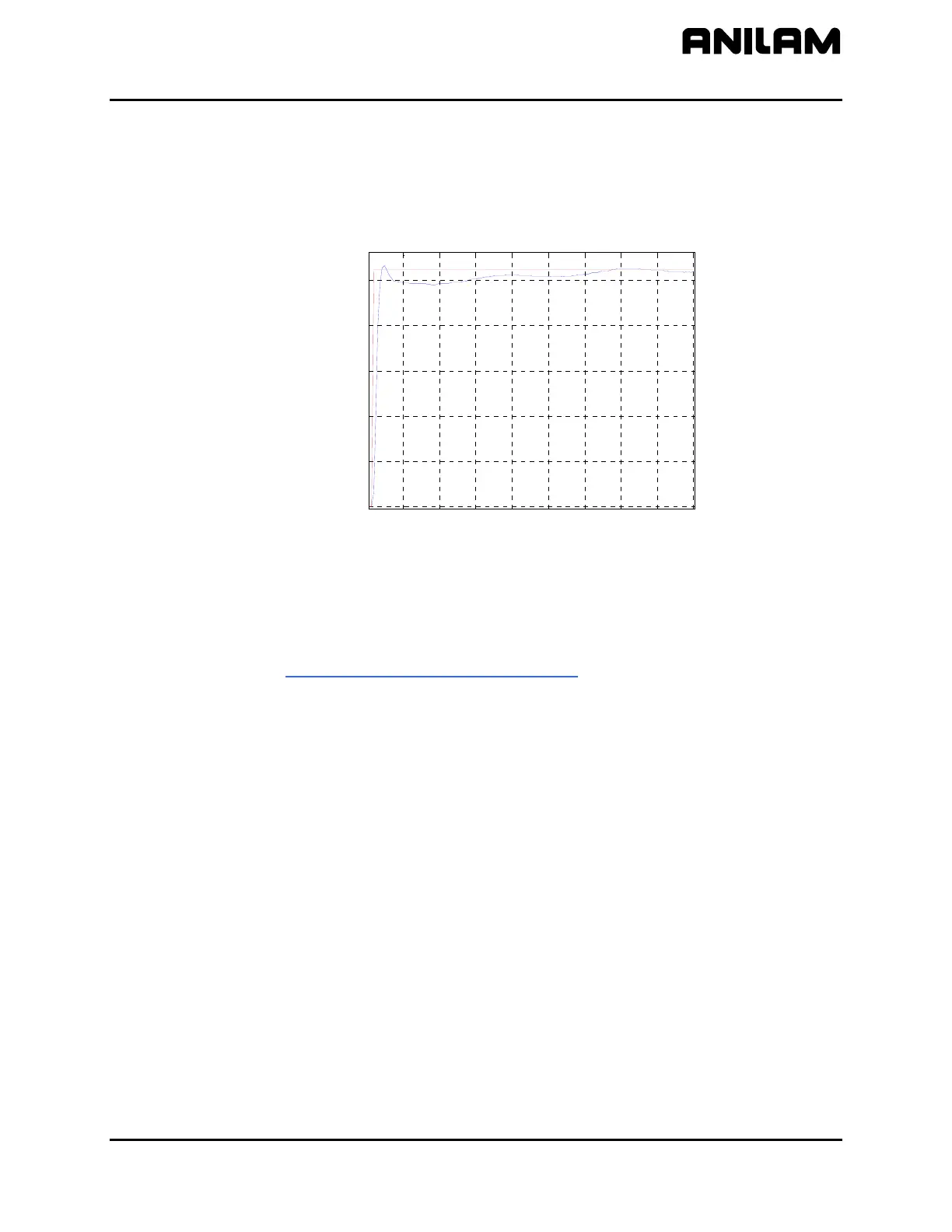
Figure 5-3, Velocity Auto-tune Display (second phase)
If the test fails, repeat to obtain a reasonable value. If the test does not
complete, look at the plot and enter 50% of the value at which the plot
starts to get distorted for MC_2x22. For MC_2x23, use 0.02. If the motor
resonates, increase MC_2x23 by 0.01 until resonance stops. See
“Velocity Integral – Manual Tuning Test
.”
Guidelines to Fine-Tune the Velocity Controller
If the axis move is jerky or tends to overshoot, you can fine-tune the
velocity controller by decreasing the proportional gain and increasing the
integral time constant for the axis you are adjusting:
Decrease in steps of 0.5 the Machine Constant (depending on the
axis selected):
• MC_2022: X Vel. Control Prop. Gain (mAs/rev)
• MC_2122: Y Vel. Control Prop. Gain (mAs/rev)
• MC_2222: Z Vel. Control Prop. Gain (mAs/rev)
• MC_2322: U Vel. Control Prop. Gain (mAs/rev)
• MC_2922: Spindle Vel. Control Prop. Gain (mAs/rev)
Increase in steps of 0.005 the Machine Constant (depending on the
axis selected):
• MC_2023: X Vel. Control Integral Timecons (.1ms)
• MC_2123: Y Vel. Control Integral Timecons (.1ms)
• MC_2223: Z Vel. Control Integral Timecons (.1ms)
10 20 30 40 50 60 70 80 90
0
200
400
600
800
1000
T in msec .
V
e
l
o
c
i
t
y