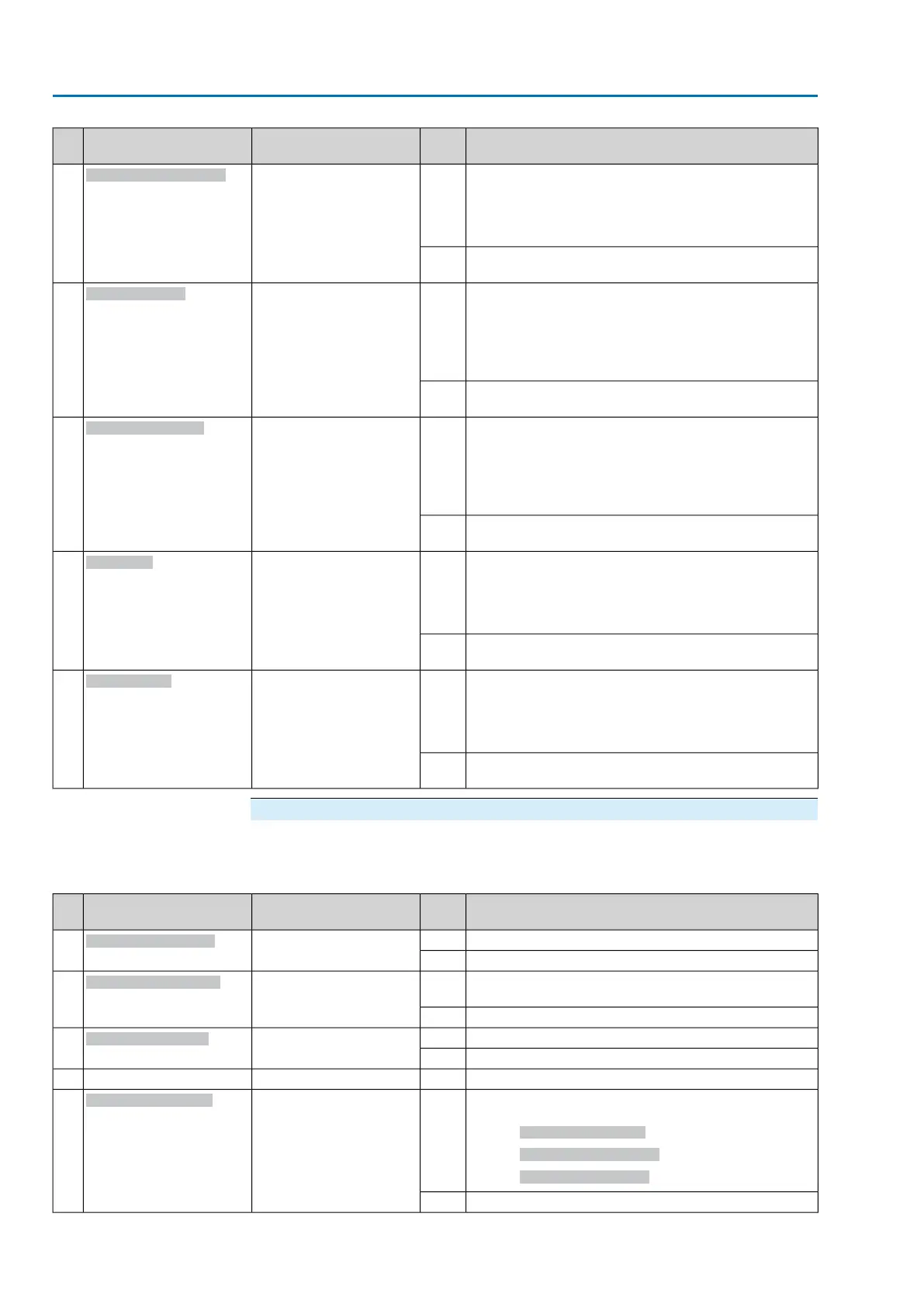
DescriptionValuePrm-Text-Def GSD fileDesignation
(process representation)
Bit
Collective signal 09:
Indication according to NAMUR recommendation NE 107
Recommendation to perform maintenance.
Contains the result of a disjunction (OR-operation) of all
bits of byte 24 (Maintenance required).
1(19) = "Bit: Maintenance
requ."
Bit: Maintenance requ.
3
In all bits of byte 24, no signals are active (all bits are set
to 0).
0
Collective signal 07:
Indication according to NAMUR recommendation NE 107
Actuator is operated outside the normal operation condi-
tions.
Contains the result of a disjunction (OR-operation) of all
bits of bytes 25 to 28 (Out of specification 1 to 4).
1(18) = "Bit: Out of spec."
Bit: Out of spec.
4
In bytes 25 and 28, no signals are active (all bits are set
to 0).
0
Collective signal 08:
Indication according to NAMUR recommendation NE 107
The actuator is being worked on; output signals are tem-
porarily invalid.
Contains the result of a disjunction (OR-operation) of all
bits of bytes 29 and 30 (Function check 1 and 2).
1(17) = "Bit: Function check"
Bit: Function check
5
In bytes 29 and 30, no signals are active (all bits are set
to 0).
0
Collective signal 10:
Indication according to NAMUR recommendation NE 107
Actuator function failure, output signals are invalid.
Contains the result of a disjunction (OR-operation) of all
bits of byte 23 (Failure).
1(16) = "Bit: Failure"
Bit: Failure
6
In all bits of byte 23, no signals are active (all bits are set
to 0).
0
Sammelmeldung 05:
The device is ready for remote control.
No AUMA warnings, AUMA faults or signals according to
NAMUR are present.
Bit 7 is set if bits 0 to 6 are deleted.
1(15) = "Bit: Device ok"
Bit: Device ok
7
Contains the result of a disjunction (OR-operation) of bits
0 to 6 (device status).
0
Byte 6: Operation status
This byte stores information about actuator movement.
Table 7: Byte 6: Operation status
DescriptionValuePrm-Text-Def GSD fileDesignation
(process representation)
Bit
The actuator is in off-time (e.g. reversing prevention time)1(23) = "Bit: Op. pause act-
ive"
Bit: Op. pause active
0
No signal0
The actuator is in an intermediate position e.g. neither in
end position OPEN nor in end position CLOSED.
1(29) = "Bit: In interm. posi-
tion"
Bit: In interm. position
1
No signal0
The actuator is within the set stepping range.1(24) = "Bit: Start step
mode"
Bit: Start step mode
2
The actuator is outside the set stepping range.0
No signal (reserved)——3
Actuator is running (output drive is moving)
Hard wired collective signal consisting of signals:
●
(26) Bit: Running LOCAL
●
(27) Bit: Running REMOTE
●
(28) Bit: Handwheel oper.
1(25) = "Bit: Actuator run-
ning"
Bit: Actuator running
4
No signal0
24
Actuator controls
Description of the data interface AC 01.2/ACExC 01.2 Profibus DP