16
C2 Series User Manual Rev. 1.9
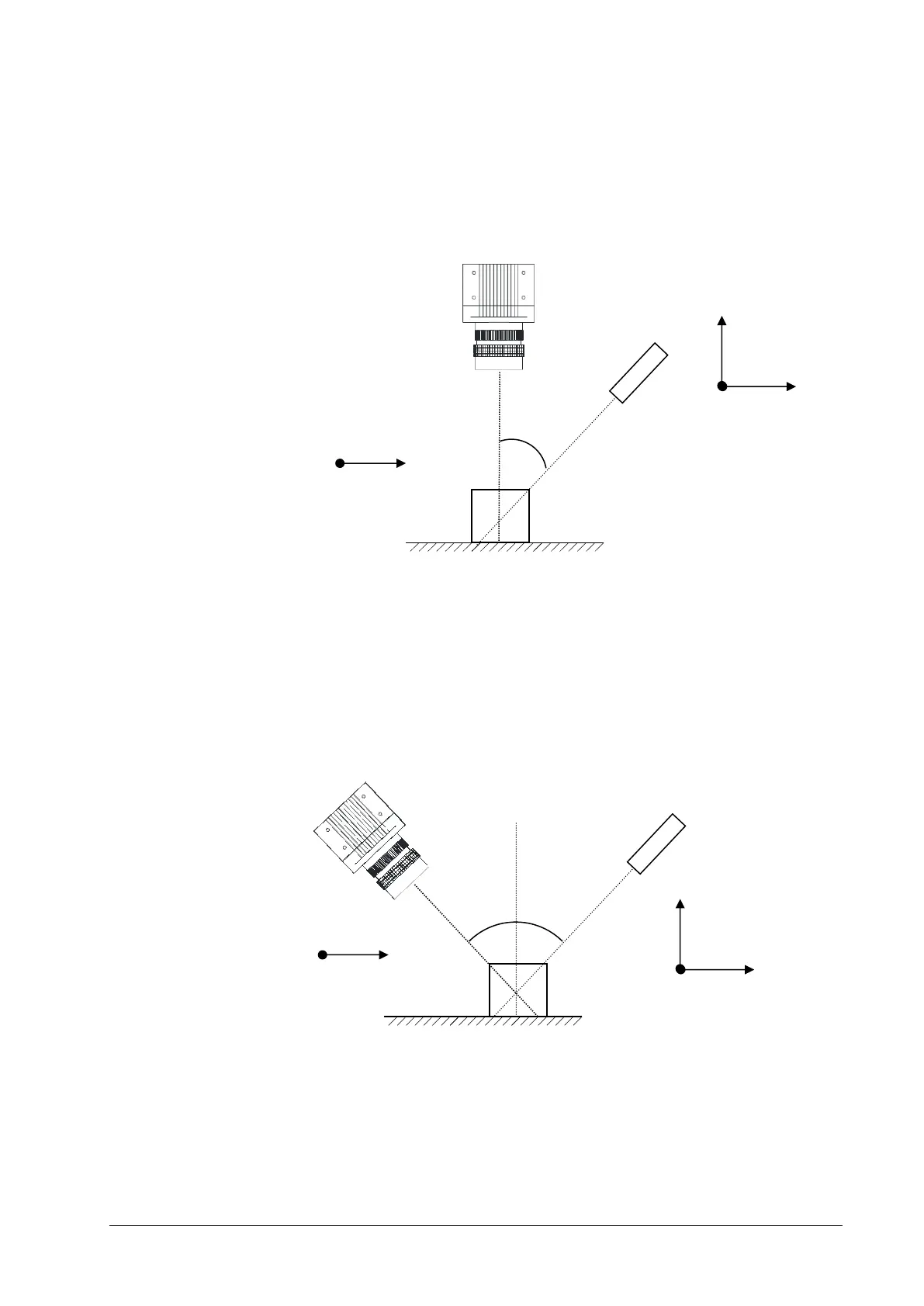
Geometry 2
The camera views the object perpendicularly to its surface, while the laser line is projected under the
triangulation angle α.
The height resolution can be approximated: ΔZ ≈ ΔX / tan(α)
Geometry 3
The camera views the object under an angle α, while the laser line is projected under a different
angle β.
The height resolution can be approximated: ΔZ ≈ ΔX * cos(β) / sin(α + β),
in case α= β (direct reflex) : ΔZ ≈ ΔX / 2* sin(α)

 Loading...
Loading...
