E-38-
1067
POSITIONER TYPE 1067
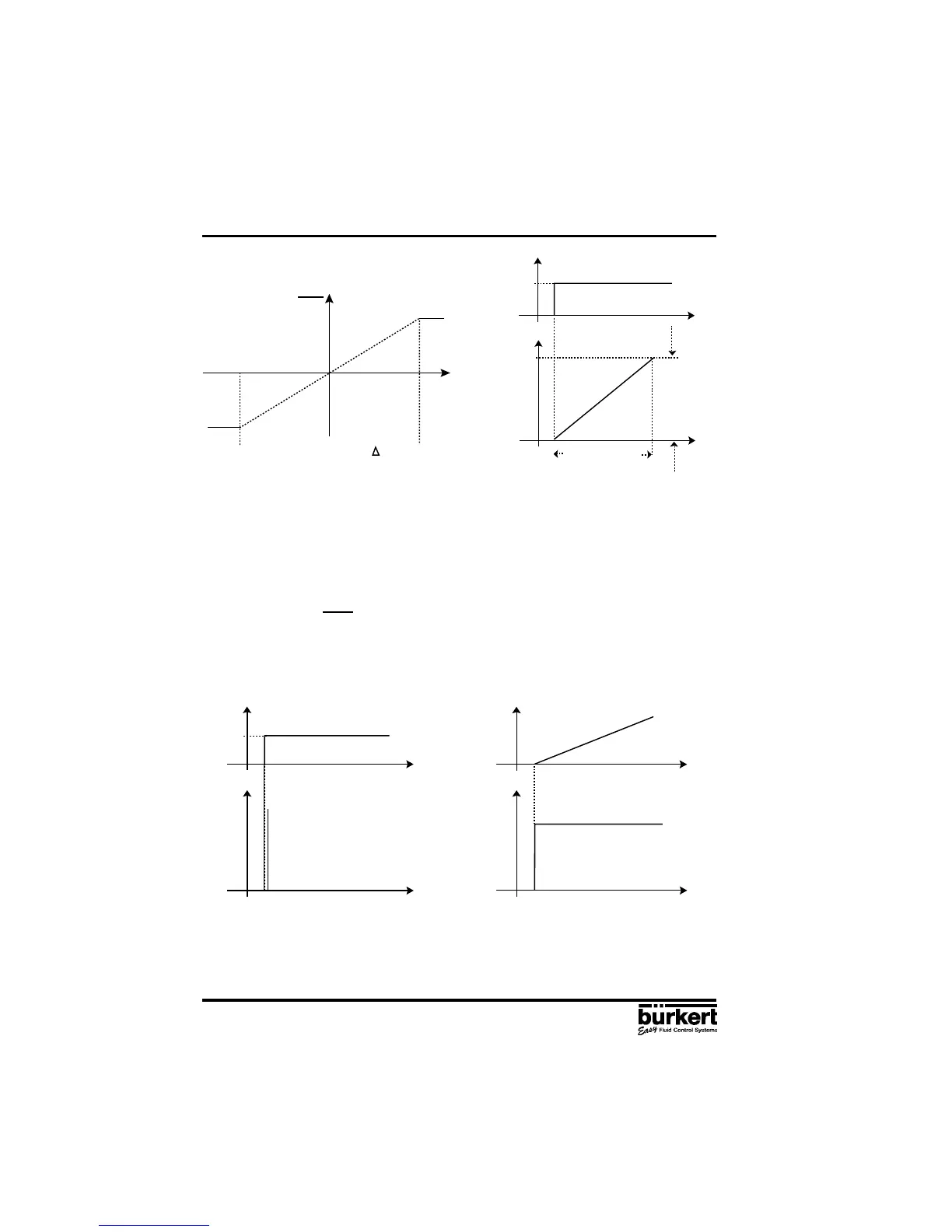
Characteristic Step response
Characteristics :
A pure I controller eliminates the effects of occuring disturbances completely. Therefore, it has a
favorable static response. Owing to its finite manipulating speed, it operates more slowly than the P
controller and tends to oscillate. Therefore, it is relatively unfavorable from the dynamic point of view.
D component :
Function :
Y= Kd
Kd ist the derivative action coefficient.
The higher Kd is, the stronger the D influence is.
APPENDIX
Xd
Xd
dY
dt
t
t
X
Y
Xd
Ymax
Ymin
Ti
Step response Rise response
Characteristics :
A controller with a D component reacts to changes in the controlled variable and is accordingly
capable of dissipating occurring deviations faster.
t
t
X
Y
Xd
t
t
X
Y
Control range
Manipulating
range ∆
Y
Manipulating time
d Xd
dt