1067
POSITIONER TYPE 1067
E-39-
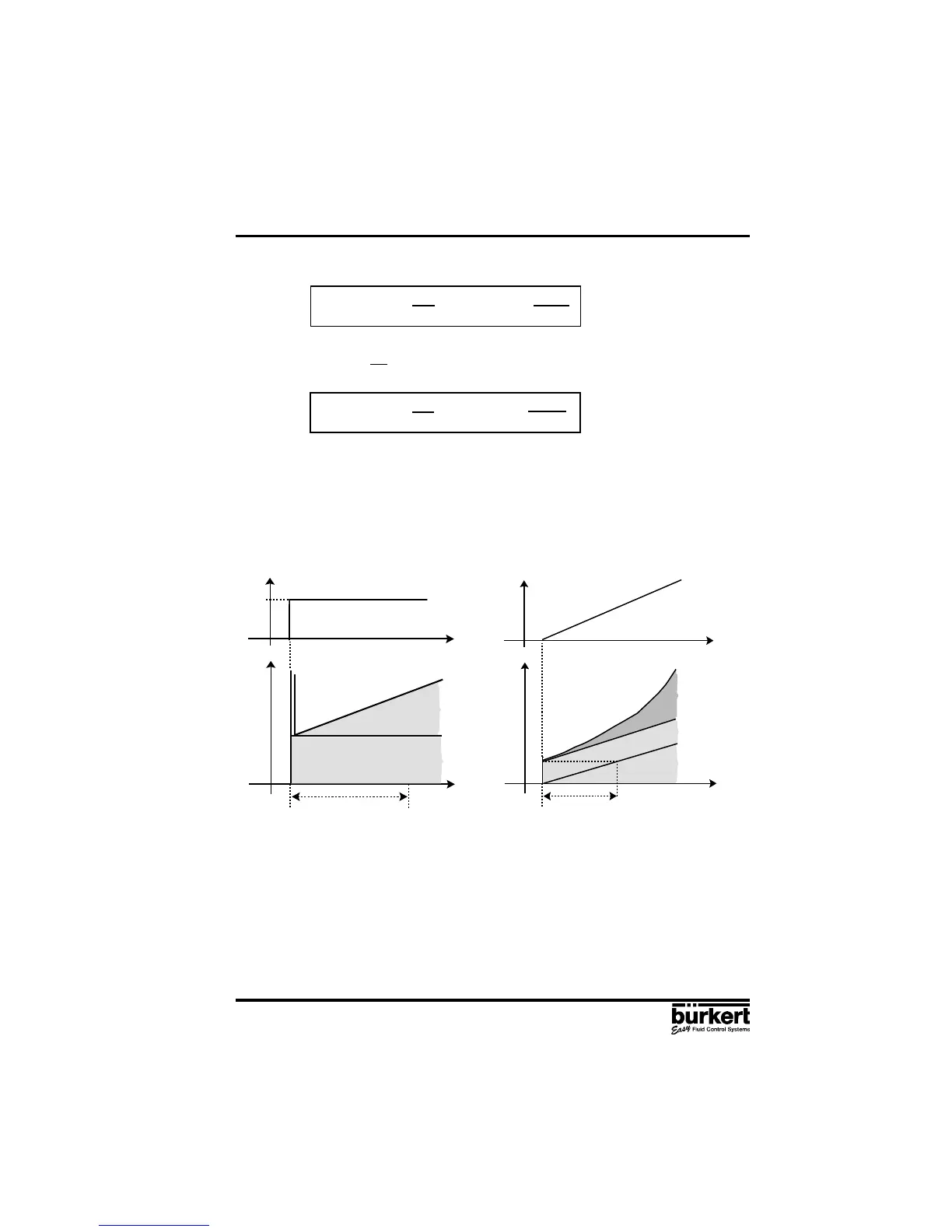
Supperposition of P-, I- and D components:
Y = Kp Xd + ƒ Xd dt + Kd
Where Kp•Ti = Tn and = Tv, results with regard to
functioning of the PID controller:
Y = Kp (Xd + ƒ Xd dt + Tv )
Kp :
Proportional action coefficient / gain
Tn :
Reset time
(the time needed to achieve the same manipulated variable change by the I
component as is produced as the result of the P component).
Tv :
Derivative action time
(the time to achieve a specific manipulated variable on the basis of
the D component earlier than when using a pure P controller).
APPENDIX
1
Ti
d Xd
dt
1
Tn
d Xd
dt
Kd
Kp
t
t
X
Y
}
}
}
Tv
Derivative action time
D component
I component
P component
t
t
X
Y
Xd
}
}
Tn
Reset time
D component
I component
P component
Step response of the PID controller Rise response of the PID controller