Page 37
Current Control Mode
Focus 1 Drives can be configured to operate in the Current Control Mode which is often
referred to as making the drive a “Current Regulator”. Since motor torque is directly
proportional to the armature current, a drive configured as a Current Regulator is often
referred to as a “Torque Regulator”.
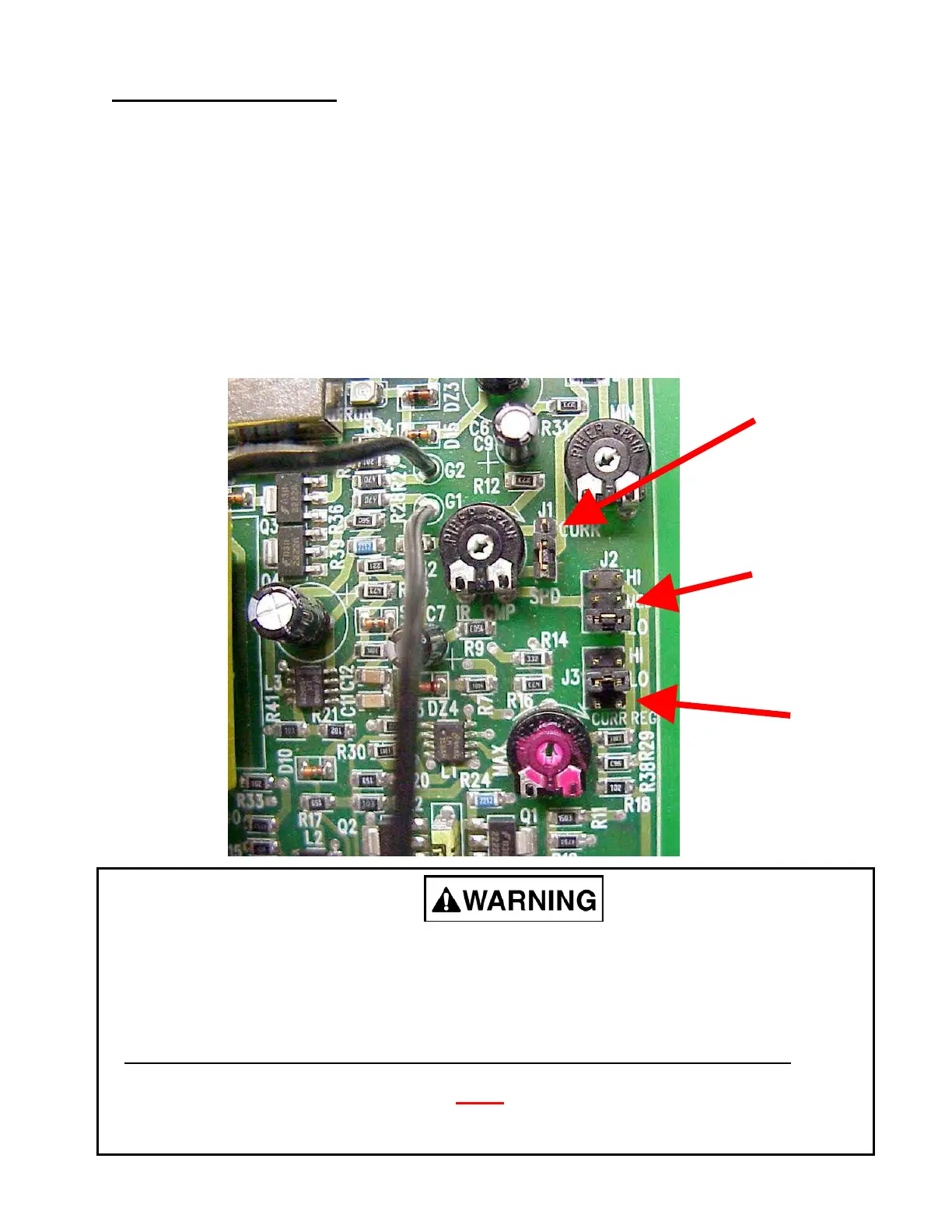
If using the Focus drive as Torque Regulator, make the following adjustments:
J1: Select current (CUR) control ( upper two pins )
J2: Select the appropriate current feedback range.
J3: Select CURR REG, lower two pins.
In Torque control mode, the motor speed is determined by how much load there is on the
motor and the torque level set on the drive. If torque in the motor (as set by the Drive) is set
to a level higher than what is required to move the load, the motor will accelerate in speed
until either the load from the motor increases to the level set by the drive or the drive
reaches its maximum output voltage (as set by the line voltage).
In the case of a lightly loaded motor,
the motor could accelerate to almost twice-base speed under these conditions.
In this mode the user be aware of this and MUST PROVIDE OVERSPEED PROTECTION. A
contact from an OverSpeed sensor could be placed in the System Interlocks-
see Application Safety
J1
J3
J2