Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Menu 0
Running
the motor
Optimisation Macros
Advanced
Parameters
Technical
Data
Diagnostics
UL Listing
Information
94 Unidrive User Guide
www.controltechniques.com Issue Number: 9
8.1.2 Closed loop vector motor control
Pr 0.46 {5.07} Motor rated current Defines the maximum motor continuous current
The motor rated current parameter must be set to the maximum continuous current of the motor to ensure the current limits in the drive function at
the correct levels so that the motor is protected should an overload situation occur.
Pr 0.42 {5.11} Motor number of poles Defines the number of motor poles
The motor number of poles parameter defines the synchronous speed of the motor, which in conjunction with the motor rated speed parameter
defines the slip speed.
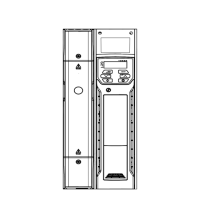
Pr 0.44 {5.09} Motor rated voltage Defines the voltage applied to the motor at rated frequency
Pr 0.47 {5.06} Motor rated frequency Defines the frequency at which rated voltage is applied
The voltage and frequency parameters define the relationship between
the voltage and frequency applied to the motor as shown aside:
The volts / frequency ratio must be kept constant to ensure rated torque
is available from the motor over the frequency range.
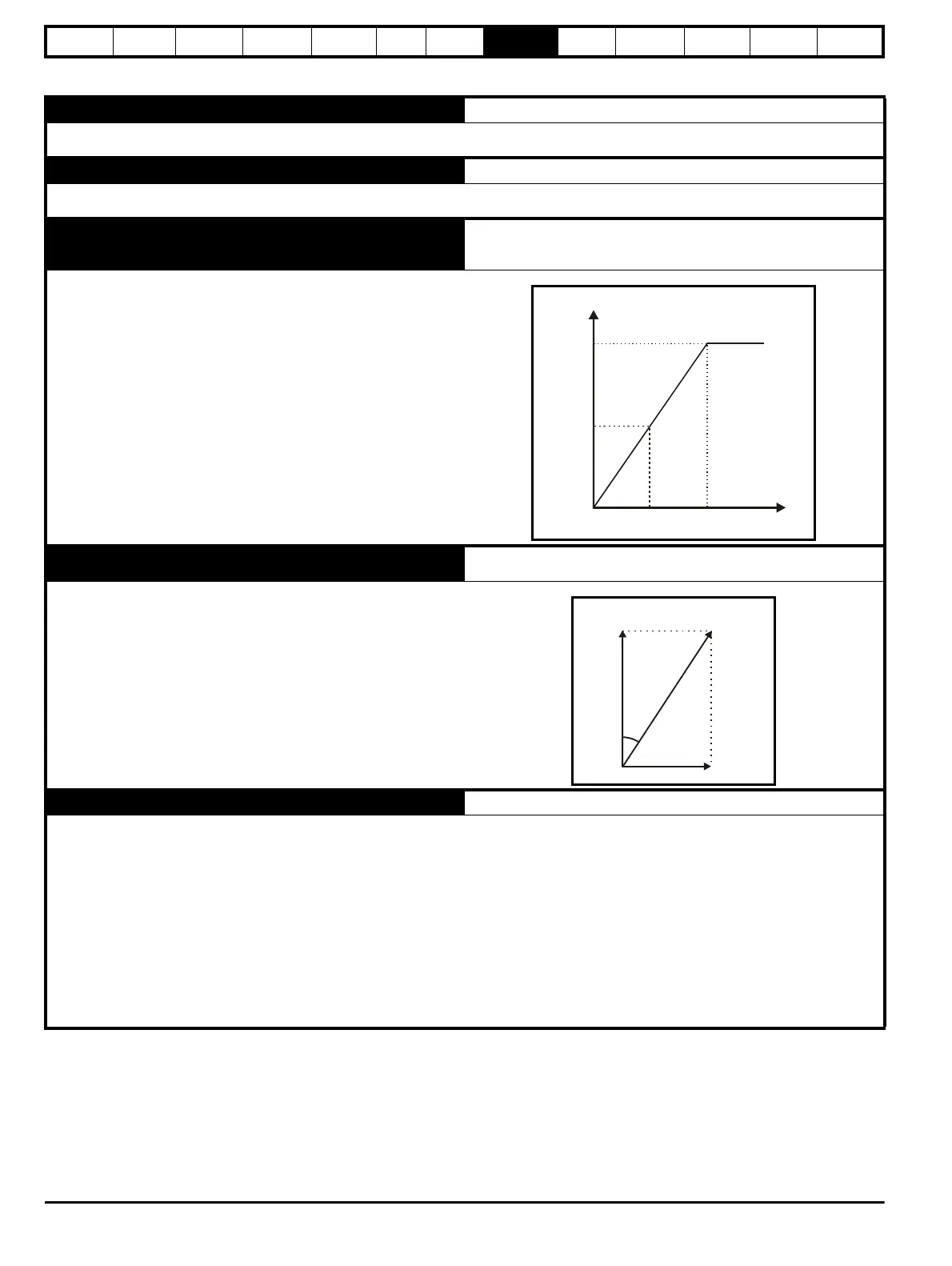
Pr 0.43 {5.10} Motor rated power factor
Defines the angle between the motor rated current and the torque
producing current
The power factor is found by the drive during the autotune procedure. It
is used to set the level at which the magnetising current is controlled.
Pr 0.45 {5.08} Motor rated speed Defines the motor rated speed
The motor rated speed parameter should be set to the synchronous speed of the motor minus the slip speed.
This is often displayed on the motor nameplate. I.e. For a typical 18.5 kW, 50 Hz, 4 pole motor the motor rated speed is 1465 rpm
The synchronous speed for a 4 pole motor is 1500 rpm therefore the slip speed is 35 rpm
Synchronous speeds for different numbers of poles are as follows:
2 pole = 3,000 rpm
4 pole = 1,500 rpm
6 pole = 1,000 rpm
8 pole = 750 rpm
The accuracy of this parameter is very important as it directly affects the torque produced at the shaft.
Often the value given on the motor nameplate is not 100% accurate which can lead to a loss of torque.
The parameter can be tuned by the drive using the slip optimiser - please see the description which follows.
Output
voltage
Pr / 2
5.09
Pr
5.09
Pr / 2
5.06
Pr
5.06
Output
frequenc
utput voltage characteristic
To r que
producing
current
Magnetisin
rr
nt
Total motor
current
Cos
φ