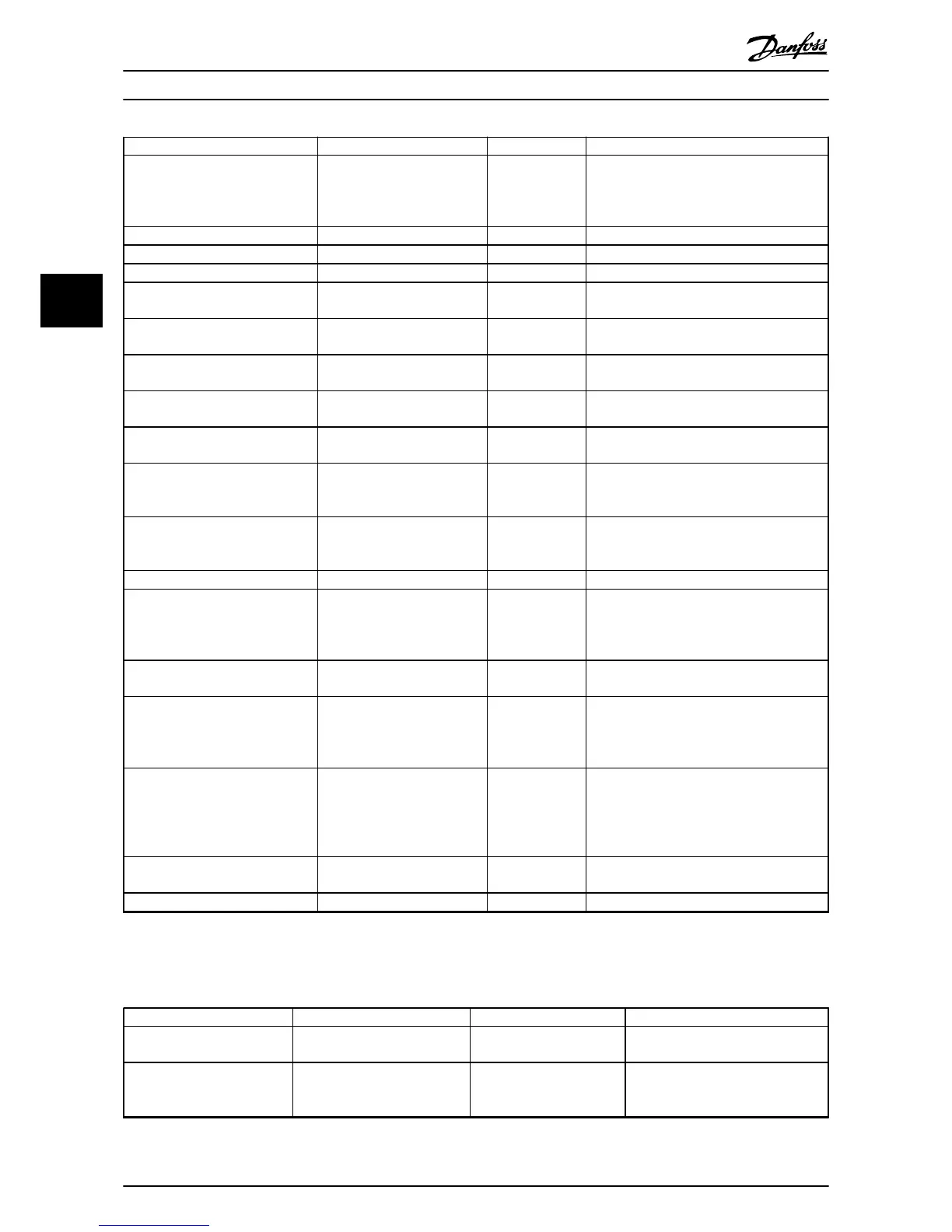
Parameter Range Default Usage
3-42 Ramp 1 Ramp Down Time
0.05–3600.0 s Size related
Ramp down time from rated 1-23 Motor
Frequency to 0 if asynchron motor is selected;
ramp down time from 1-25 Motor Nominal
Speed to 0 if PM motor is selected.
4-12 Motor Speed Low Limit [Hz]
0–400 Hz 0.0 Hz Enter the minimum limit for low speed.
4-14 Motor Speed High Limit [Hz]
0–400 Hz 100 Hz Enter the minimum limit for high speed.
4-19 Max Output Frequency
0–400 Size related Enter the maximum output frequency value.
6-29 Terminal 54 mode
[0] Current
[1] Voltage
1 Select if terminal 54 is used for current- or
voltage input.
6-20 Terminal 54 Low Voltage
0–10 V 0.07 V Enter the voltage that corresponds to the low
reference value.
6-21 Terminal 54 High Voltage
0–10 V 10 V Enter the voltage that corresponds to the low
high reference value.
6-22 Terminal 54 Low Current
0–20 mA 4 Enter the current that corresponds to the high
reference value.
6-23 Terminal 54 High Current
0–20 mA 20 Enter the current that corresponds to the high
reference value.
6-24 Terminal 54 Low Ref./Feedb.
Value
-4999–4999 0 Enter the feedback value that corresponds to
the voltage or current set in 6-20 Terminal 54
Low Voltage/6-22 Terminal 54 Low Current.
6-25 Terminal 54 High Ref./Feedb.
Value
-4999–4999 50 Enter the feedback value that corresponds to
the voltage or current set in 6-21 Terminal 54
High Voltage/6-23 Terminal 54 High Current.
6-26 Terminal 54 Filter Time Constant
0–10 s 0.01 Enter the filter time constant.
20-81 PI Normal/ Inverse Control
[0] Normal
[1] Inverse
0
Select [0] Normal to set the process control to
increase the output speed when the process
error is positive. Select [1] Inverse to reduce
the output speed.
20-83 PI Start Speed [Hz]
0–200 Hz 0 Enter the motor speed to be attained as a
start signal for commencement of PI control.
20-93 PI Proportional Gain
0–10 0.01 Enter the process controller proportional gain.
Quick control is obtained at high amplifi-
cation. However if amplification is too great,
the process may become unstable.
20-94 PI Integral Time
0.1–999.0 s 999.0 s Enter the process controller integral time.
Obtain quick control through a short integral
time, though if the integral time is too short,
the process becomes unstable. An excessively
long integral time disables the integral action.
30-22 Locked Rotor Detection
[0] Off
[1] On
[0] Off –
30-23 Locked Rotor Detection Time [s]
0.05–1 s 0.10 s –
Table 4.5 Set-up Wizard for Closed Loop Applications
Motor set-up
The Motor Set-up wizard guides through the needed motor parameters.
Parameter Range Default Usage
0-03 Regional Settings
[0] International
[1] US
0 –
0-06 GridType
[0] -[132] see start -up wizard for
open loop application
Size selected Select the operating-mode for restart
upon reconnection of the drive to
mains voltage after power down.
Programming Quick Guide
34 Danfoss A/S © 08/2014 All rights reserved. MG18A602
44