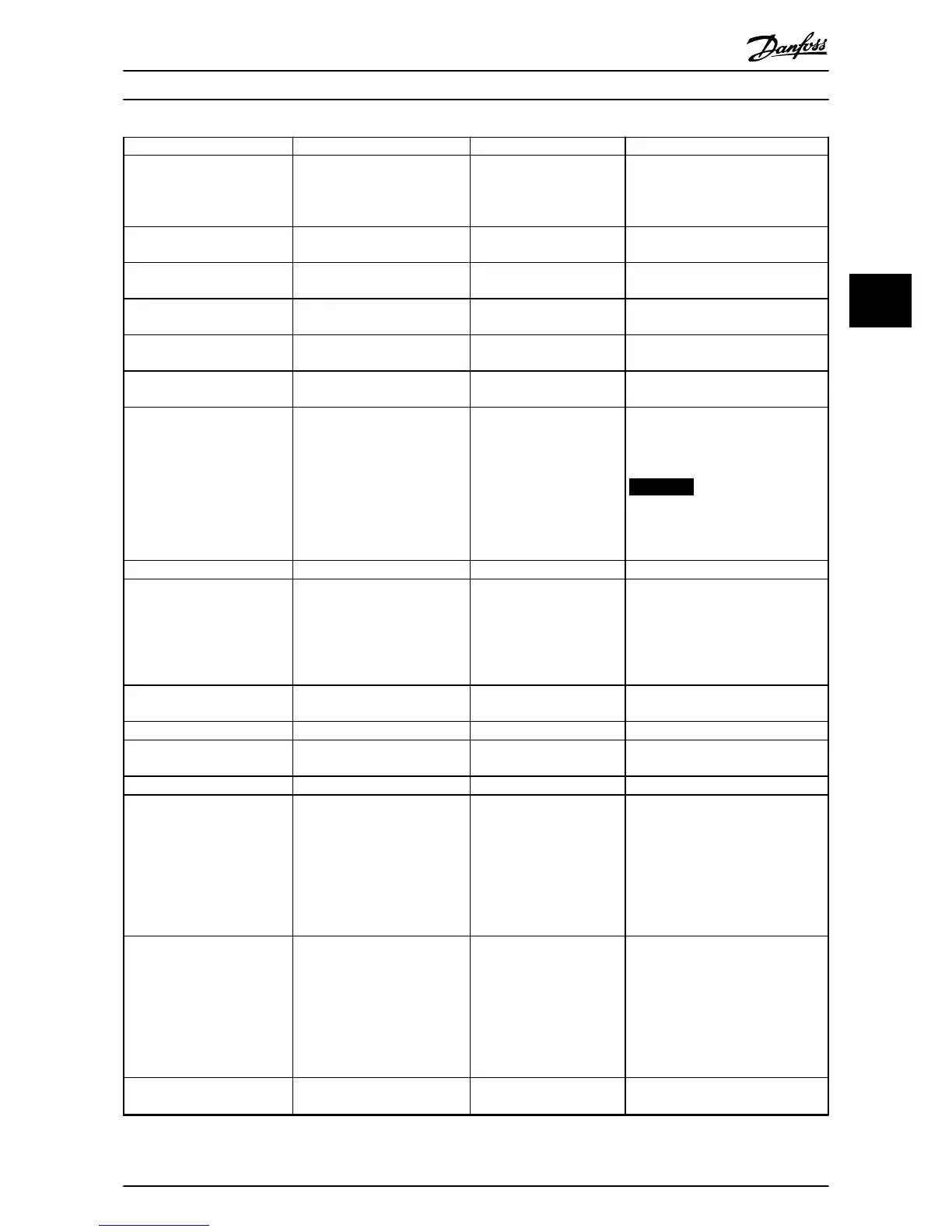
Parameter Range Default Usage
1-10 Motor Construction
*[0] Asynchron
[1] PM, non-salient SPM
[2] PM, salient IPM, non Sat.
[3] PM, salient IPM, Sat.
[0] Asynchron –
1-20 Motor Power
0.12–110 kW/0.16–150 hp Size related Enter the motor power from the
nameplate data.
1-22 Motor Voltage
50–1000 V Size related Enter the motor voltage from the
nameplate data.
1-23 Motor Frequency
20–400 Hz Size related Enter the motor frequency from the
nameplate data.
1-24 Motor Current
0.01–10000.00 A Size related Enter the motor current from the
nameplate data.
1-25 Motor Nominal Speed
50–9999 RPM Size related Enter the motor nominal speed from
the nameplate data.
1-26 Motor Cont. Rated Torque
0.1–1000.0 Size related This parameter is available when
1-10 Motor Construction is set to
options that enable permanent motor
mode.
NOTICE
Changing this parameter affects
the settings of other parameters.
1-30 Stator Resistance (Rs)
0–99.990 Size related Set the stator resistance value.
1-37 d-axis Inductance (Ld)
0–1000 Size related Enter the value of the d-axis
inductance.
Obtain the value from the permanent
magnet motor data sheet. The de-axis
inductance cannot be found by
performing an AMA.
1-38 q-axis Inductance (Lq)
0–1000 mH Size related Enter the value of the q-axis
inductance.
1-39 Motor Poles
2–100 4 Enter the number of motor poles.
1-40 Back EMF at 1000 RPM 10–9000 Size related Line-Line RMS back EMF voltage at
1000 RPM.
1-42 Motor Cable Length
0–100 m 50 m Enter the motor cable length.
1-44 d-axis Inductance Sat.
(LdSat)
0–1000 mH Size related This parameter corresponds to the
inductance saturation of Ld. Ideally,
this parameter has the same value as
1-37 d-axis Inductance (Ld). However, if
the motor supplier provides an
induction curve, the induction value @
200% of isNom should be entered
here.
1-45 q-axis Inductance Sat.
(LqSat)
0–1000 mH Size related This parameter corresponds to the
inductance saturation of Lq. Ideally,
this parameter has the same value as
1-38 q-axis Inductance (Lq). However, if
the motor supplier provides an
induction curve, the induction value @
200% of isNom should be entered
here.
1-46 Position Detection Gain
20–200% 100% Adjusts the height of the test pulse
during position detection at start.
Programming Quick Guide
MG18A602 Danfoss A/S © 08/2014 All rights reserved. 35
4 4