1-36 Iron Loss Resistance (Rfe)
Range: Function:
Application
dependent
*
[Application
dependant]
Enter the equivalent iron loss
resistance (R
Fe
) value to
compensate for iron loss in the
motor.
The R
Fe
value cannot be found by
performing an AMA.
The R
Fe
value is especially
important in torque control
applications. If R
Fe
is unknown,
leave 1-36 Iron Loss Resistance
(Rfe) on default setting.
1-37 d-axis Inductance (Ld)
Range: Function:
Application
dependent
*
[Application
dependant]
Enter the value of the d-axis
inductance. Obtain the value from
the permanent magnet motor data
sheet.
This parameter is only active when
1-10 Motor Construction has the
value PM, non-salient SPM [1]
(Permanent Magnet Motor).
For a selection with one decimal,
use this parameter. For a selection
with three decimals, use 30-80 d-
axis inductance (Ld).
This parameter is available for the
FC 302 only.
1-39 Motor Poles
Range: Function:
Application
dependent
*
[2 - 100 ] Enter the number of motor
poles.
Poles ~n
n
@ 50 Hz ~n
n
@60 Hz
2 2700 - 2880 3250 - 3460
4 1350 - 1450 1625 - 1730
6 700 - 960 840 - 1153
The table shows the number of poles for normal speed
ranges of various motor types. Define motors designed for
other frequencies separately. The motor pole value is always
an even number, because it refers to the total number of
poles, not pairs of poles. The adjustable frequency drive
creates the initial setting of 1-39 Motor Poles based on
1-23 Motor Frequency and 1-25 Motor Nominal Speed.
1-40 Back EMF at 1000 RPM
Range: Function:
Application
dependent
*
[Application
dependant]
Set the nominal back EMF for the
motor when running at 1000 RPM.
This parameter is only active when
1-10 Motor Construction is set to
PM motor [1] (Permanent Magnet
Motor).
This parameter is available for the
FC 302 only.
NOTE!
When using PM motors, it is
recommended to use brake
resistors.
1-41 Motor Angle Offset
Range: Function:
0
*
[-32768 -
32767 ]
Enter the correct offset angle between the PM
motor and the index position (single-turn) of the
attached encoder or resolver. The value range of
0–32768 corresponds to 0–2 * pi (radians). To
obtain the offset angle value: After starting the
adjustable frequency drive, apply DC hold and
enter the value of 16-20 Motor Angle into this
parameter.
This parameter is only active when 1-10 Motor
Construction is set to PM, non-salient SPM [1]
(Permanent Magnet Motor).
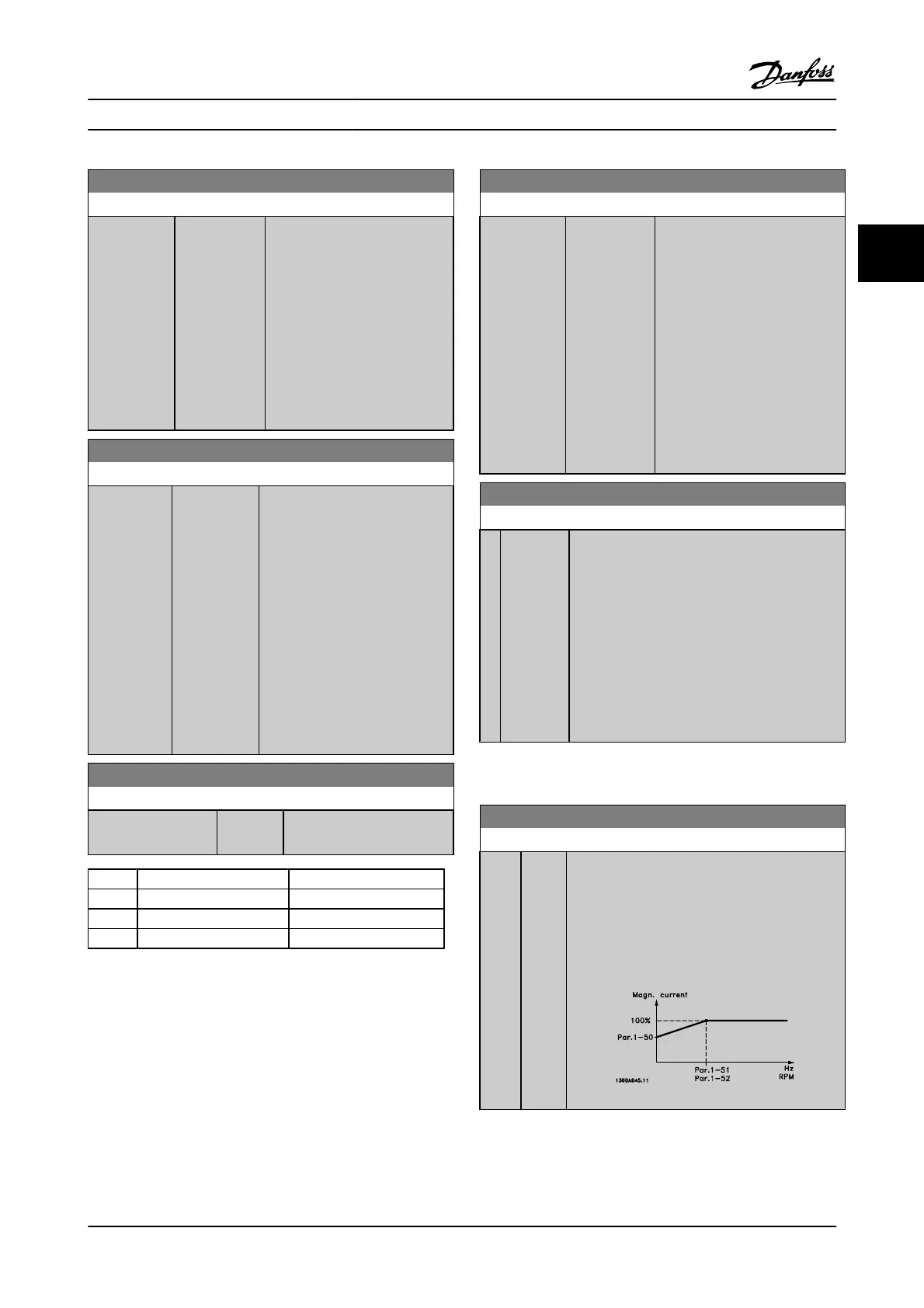
3.3.5 1-5* Load Indep. Setting
1-50 Motor Magnetization at Zero Speed
Range: Function:
100
%
*
[0 -
300 %]
Use this parameter along with 1-51 Min Speed
Normal Magnetizing [RPM] to obtain a different
thermal load on the motor when running at low
speed.
Enter a value which is a percentage of the rated
magnetizing current. If the setting is too low, the
torque on the motor shaft may be reduced.
Parameter Descriptions FC 300 Programming Guide
MG.33.MA.22 - VLT
®
is a registered Danfoss trademark 3-17
3

 Loading...
Loading...





