3.2.7 1-5* Load Indep. Setting
Parameters for load-independent motor settings.
1-50 Motor Magnetisation at Zero Speed
Range: Function:
100
%*
[0 -
300 %
]
Use this parameter along with parameter 1-52 Min
Speed Normal Magnetising [Hz] to obtain a
dierent thermal load on the motor when running
at low speed.
Enter a value that is a percentage of the rated
magnetizing current. If the setting is too low, the
torque on the motor shaft may be reduced.
Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Illustration 3.2 Motor Magnetization
1-52 Min Speed Normal Magnetising [Hz]
Range: Function:
1 Hz* [0.1 - 10.0
Hz]
Set the required frequency for normal
magnetizing current.
Use this parameter along with
parameter 1-50 Motor Magnetisation at Zero
Speed. See Illustration 3.2.
1-55 U/f Characteristic - U
Array [6]
Range: Function:
Size related* [0 - 999
V]
Enter voltage at each frequency point
to form a U/f characteristic matching
the motor. Frequency points are
dened in parameter 1-56 U/f Charac-
teristic - F.
1-56 U/f Characteristic - F
Array[6]
Range: Function:
Size
related*
[ 0 -
400.0
Hz]
Enter frequency points to form a U/f charac-
teristic matching the motor. Voltage at each
point is dened in parameter 1-55 U/f Charac-
teristic - U.
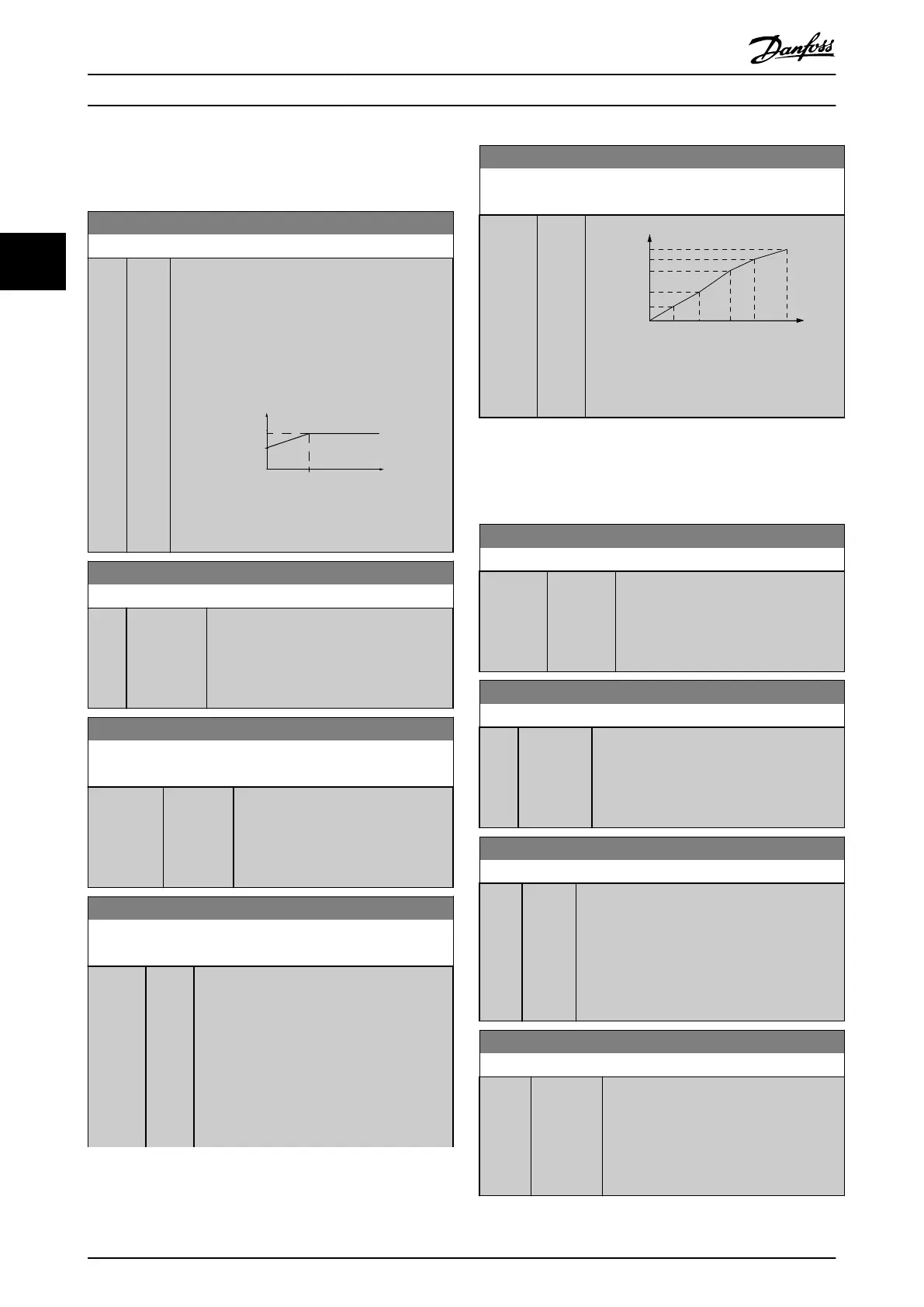
Make a U/f characteristic based on 6 denable
voltages and frequencies, see Illustration 3.3.
Simplify U/f characteristics by merging 2 or
more points (voltages and frequencies). Set
the points at equal values.
1-56 U/f Characteristic - F
Array[6]
Range: Function:
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
Illustration 3.3 U/f Characteristic
3.2.8 1-6* Load Depen. Setting
Parameters for adjusting the load-dependent motor
settings.
1-62 Slip Compensation
Range: Function:
Size
related*
[-400 -
400 %]
Enter the % value for slip compensation
to compensate for tolerances in the
value of n
M,N
. Slip compensation is
calculated automatically, which is based
on the nominal motor speed n
M,N
.
1-63 Slip Compensation Time Constant
Range: Function:
0.1 s* [0.05 - 5 s] Enter the slip compensation reaction speed.
A high value results in slow reaction, and a
low value results in quick reaction. If low-
frequency resonance problems occur, use a
longer time setting.
1-64 Resonance Dampening
Range: Function:
100
%*
[0 -
500 %]
Enter the resonance damping value. Set
parameter 1-64 Resonance Dampening and
parameter 1-65 Resonance Dampening Time
Constant to help eliminate high-frequency
resonance problems. To reduce resonance
oscillation, increase the value of
parameter 1-64 Resonance Dampening.
1-65 Resonance Dampening Time Constant
Range: Function:
0.005 s* [0.001 -
0.050 s]
Set parameter 1-64 Resonance Dampening
and parameter 1-65 Resonance Dampening
Time Constant to help eliminate high-
frequency resonance problems. Enter the
time constant that provides the best
dampening.
Parameters
VLT
®
HVAC Basic Drive FC 101
36 Danfoss A/S © 04/2018 All rights reserved. MG18B502
33

 Loading...
Loading...











