4.19 Parameters: 22-** Application
Functions
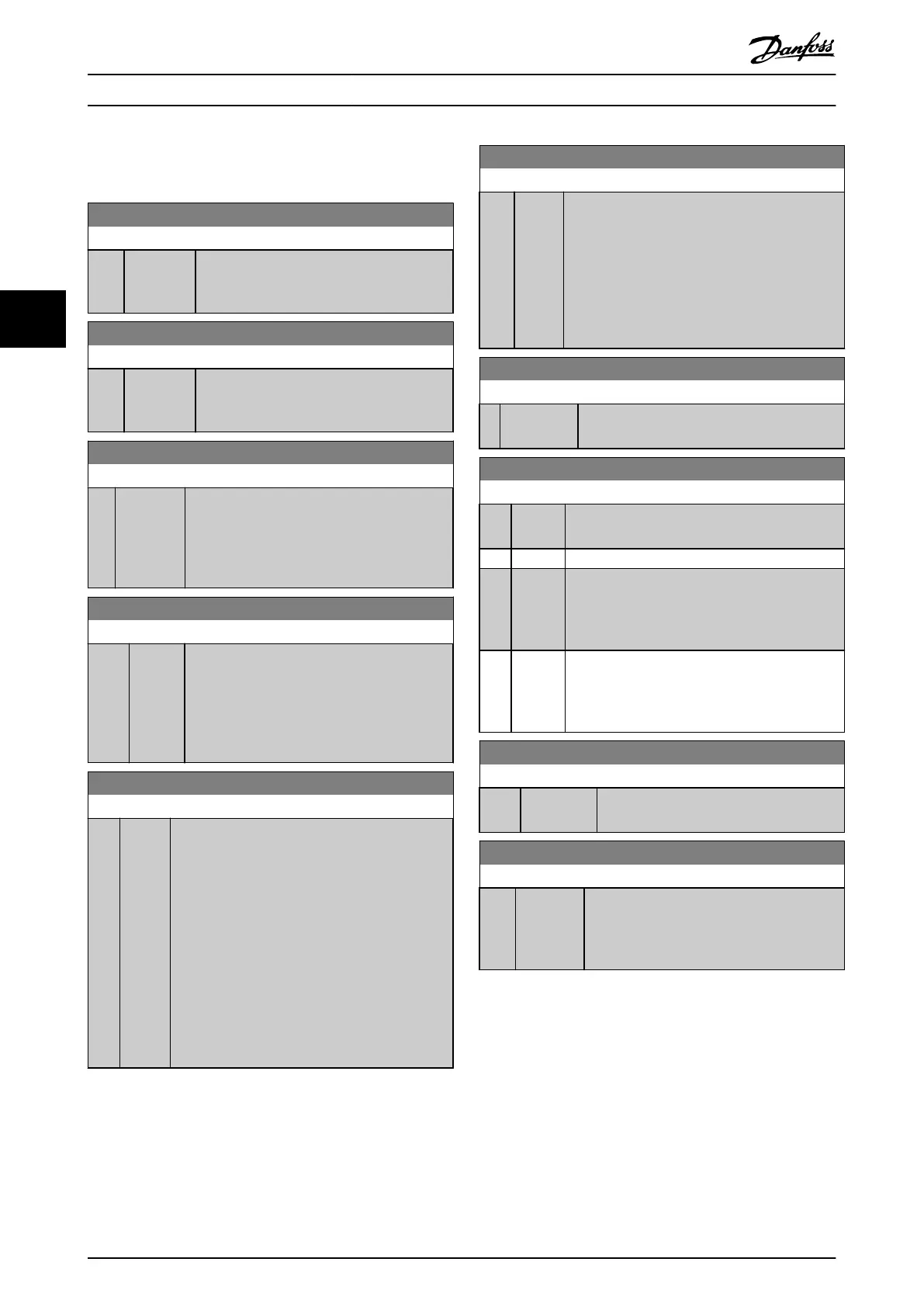
22-40 Minimum Run Time
Range: Function:
10 s* [0 - 600 s] Set the wanted minimum running time for
the motor after a start command (digital
input or bus) before entering sleep mode.
22-41 Minimum Sleep Time
Range: Function:
10 s* [0 - 600 s] Set the minimum time for staying in sleep
mode. This time overrides any wake-up
conditions.
22-43 Wake-Up Speed [Hz]
Range: Function:
10* [ 0 -
400.0 ]
Only to be used if parameter 1-00 Conguration
Mode, is set for open loop and an external
controller applies speed reference. Set the
reference speed at which the sleep mode
should be deactivated.
22-44 Wake-Up Ref./FB Di
Range: Function:
10 %* [0 -
100 %]
Only to be used if parameter 1-00 Conguration
Mode is set for closed loop and the integrated
PI controller is used for controlling the pressure.
Set the pressure drop allowed in percentage of
setpoint for the pressure (P
set
) before cancelling
the sleep mode.
22-45 Setpoint Boost
Range: Function:
0 %
*
[-100
-
100 %]
Only to be used if parameter 1-00 Conguration
Mode is set for closed loop, and the integrated PI
controller is used. In systems with for example
constant pressure control, it is advantageous to
increase the system pressure before the motor is
stopped. This extends the time in which the motor
is stopped and helps to avoid frequent start/stop.
Set the desired overpressure/temperature in
percentage of setpoint for the pressure (P
set
)/
temperature before entering the sleep mode.
If setting for 5%, the boost pressure is P
set
x1.05.
The negative values can be used for cooling tower
control where a negative change is needed.
22-46 Maximum Boost Time
Range: Function:
60
s*
[0 -
600 s]
Only to be used when parameter 1-00 Congu-
ration Mode is set for closed loop and the
integrated PI controller is used for controlling the
pressure.
Set the maximum time for which boost mode is
allowed. If the set time is exceeded, sleep mode is
entered, not waiting for the set boost pressure to
be reached.
22-47 Sleep Speed [Hz]
Range: Function:
0* [ 0 - 400.0 ] Set the speed below which the frequency
converter goes into sleep mode.
22-60 Broken Belt Function
Option: Function:
Select the actions to be performed if the broken-
belt condition is detected.
[0] * O
[1] Warning The frequency converter continues to run, but
activates warning 95, Broken belt. A frequency
converter digital output or a serial communication
bus communicates a warning to other equipment.
[2] Trip The frequency converter stops running and
activates alarm 95, Broken belt. A frequency
converter digital output or a serial communication
bus communicates an alarm to other equipment.
22-61 Broken Belt Torque
Range: Function:
10 %* [5 - 100 %] Sets the broken-belt torque as a percentage
of the rated motor torque.
22-62 Broken Belt Delay
Range: Function:
10 s* [0 - 600
s]
Set the time for which the broken-belt
conditions must be active before carrying out
the action selected in parameter 22-60 Broken
Belt Function.
Parameter Descriptions
VLT
®
Midi Drive FC 280
106 Danfoss A/S © 12/2015 All rights reserved. MG07C102
44

 Loading...
Loading...















