Chapter 6 Control Mode of Operation ASDA-A2
6-24 Revision February, 2017
6.3 Speed Mode
Speed control mode (S or Sz) is applicable in precision speed control, such as CNC machine tools.
This servo drive includes two types of command input, analog and register. Analog command input
can use external voltage to control the motor speed. There are two methods in register input. One
is used before operation. Users set different value of speed command in three registers, and then
use SP0, SP1 of CN1 DI signal for switching. Another method is to change the value of register by
communication. In order to deal with the problem of non-continuous speed command when
switching register, a complete S-curve program is provided. In close-loop system, this servo drive
adopts gain adjustment and integrated PI controller and two modes (manual and auto) for selection.
Users can set all parameters and all auto or auxiliary function will be disabled in manual mode.
While in auto mode, it provides the function of load inertia estimation and parameter adjustment. In
auto mode, parameters which set by users will be regarded as the default value.
6.3.1 Selection of Speed Mode
There are two types of speed command source, analog voltage and internal parameters. The
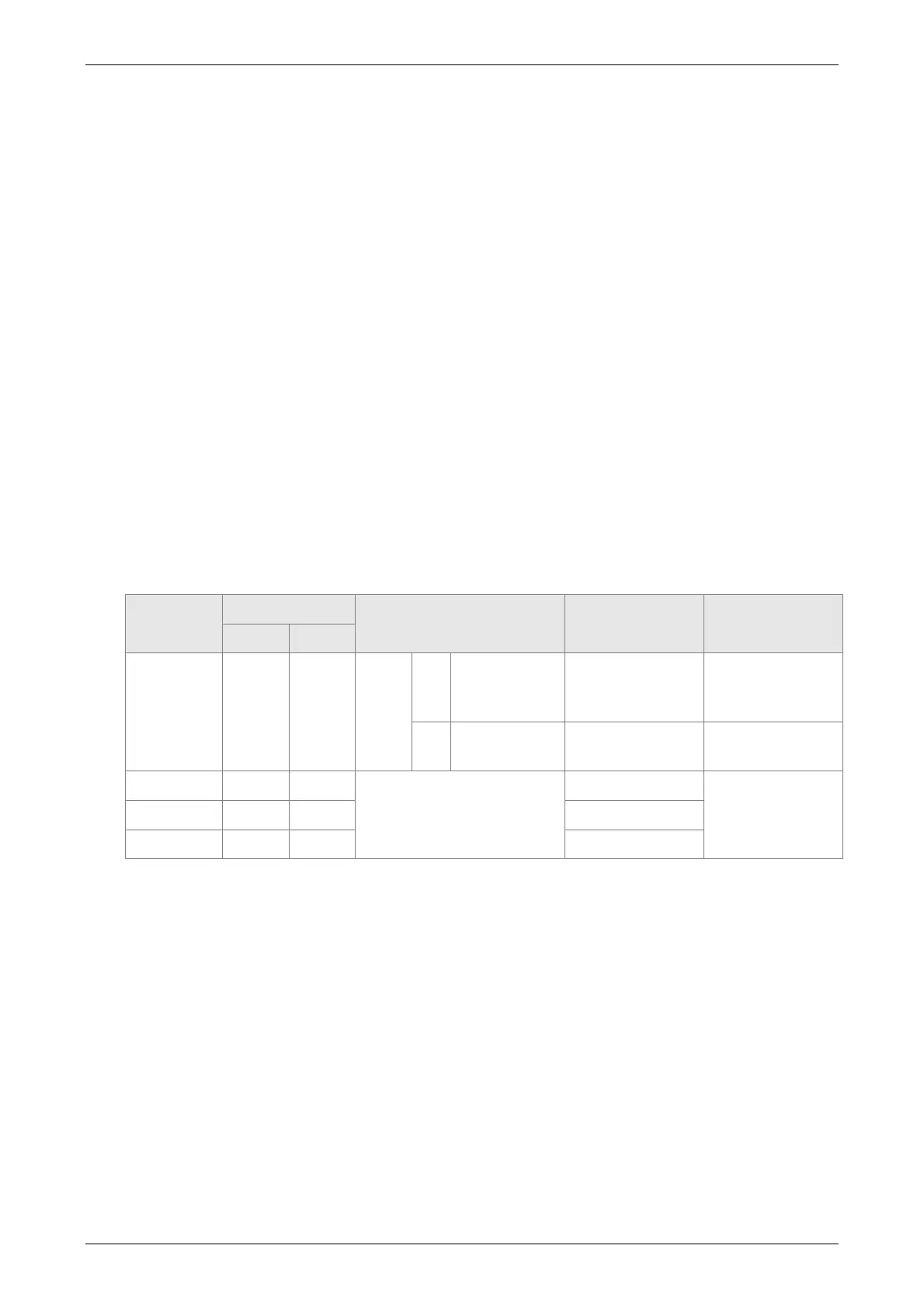
selection is determined by CN1 DI signal. See as the followings.
Speed
Command
CN1 DI signal
Command Source Content Range
SPD1 SPD0
S1 0 0 Mode
S
External
analog
signal
Voltage
between V-
REF-GND
-10 V ~ +10V
Sz N/A
Speed
command is 0
0
S2 0 1
Register parameters
P1-09
-60000 ~ 60000
S3 1 0 P1-10
S4 1 1 P1-11
Status of SPD0 ~ SPD1: 0 means DI OFF, 1 means DI ON.
When both SPD0 and SPD1 are 0, if it is in Sz mode, the command will be 0. Thus, if there
is no need to use analog voltage as the speed command, Sz mode can be applied to tackle
the problem of zero-drift. If it is in S mode, the command will be the voltage deviation
between V-REF and GND. The range of input voltage is between -10V and +10V and its
corresponding speed is adjustable (P1-40).
When one of SPD0 and SPD1 is not 0, the speed command is from the internal parameter.
The command is activated after changing the status of SPD0~SPD1. There is no need to
use CTRG for triggering.
 Loading...
Loading...
