ASDA-A2 Chapter 6 Control Mode of Operation
Revision February, 2017 6-45
6.4 Torque Mode
Torque control mode (T or Tz) is appropriate in torque control application, such as printing machine,
winding machine, etc. There are two kinds of command source, analog input and register. Analog
command input uses external voltage to control the torque of the motor while register uses the
internal parameters (P1-12~P1-14) as the torque command.
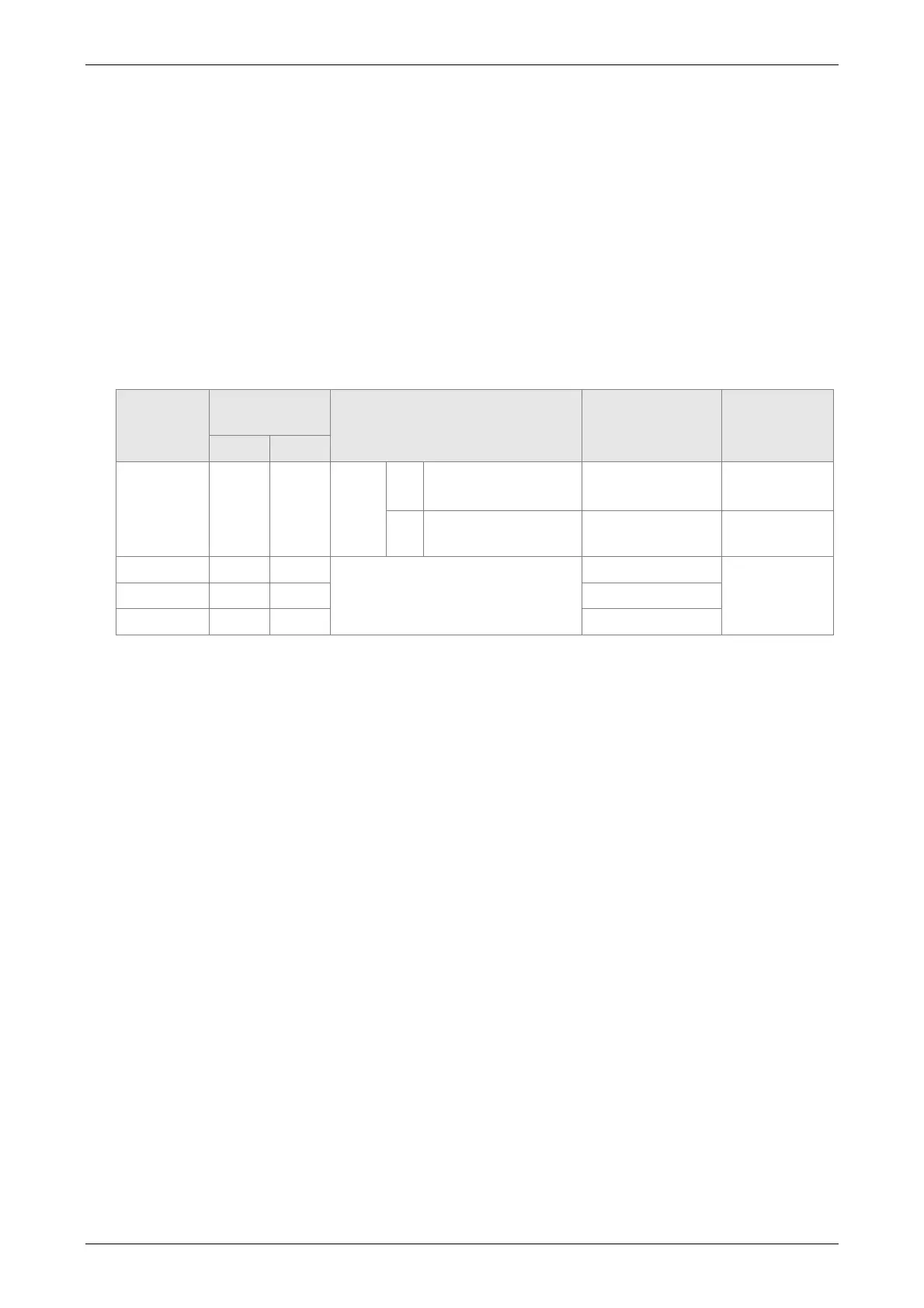
6.4.1 Selection of Torque Command
Torque command source are external analog voltage and parameters. It uses CN1 DI signal for
selection. See as below.
Torque
Command
DI signal of
CN1
Command Source Content Range
TCM1 TCM0
T1 0 0 Mode
T
External analog
command
Voltage between
T-REF-GND
-10V ~ +10V
Tz None
Torque command
is 0
0
T2 0 1
Parameters
P1-12
-300% ~
300%
T3 1 0 P1-13
T4 1 1 P1-14
The status of TCM0 ~ TCM1: 0 means DI OFF and 1 means DI ON.
When TCM0 = TCM1 = 0, if it is in Tz mode, then the command is 0. Thus, if there is no
need to use analog voltage as torque command, Tz mode is applicable and can avoid the
problem of zero drift. If it is in T mode, the command will be the voltage deviation between
T-REF and GND. Its input voltage range is -10V~+10V, which mean the corresponding
torque is adjustable (P1-41).
When neither TCM0 nor TCM1 is 0, parameters become the source of torque command.
The command will be executed after TCM0 ~ TCM1 are changed. There is no need to use
CTRG for triggering.
The torque command can be used in torque mode (T or Tz) and speed mode (S or Sz). When it is
in speed mode, it can be regarded as the command input of torque limit.
 Loading...
Loading...
