Chapter 12 Absolute System ASDA-A2
Revision February, 2017 12-23
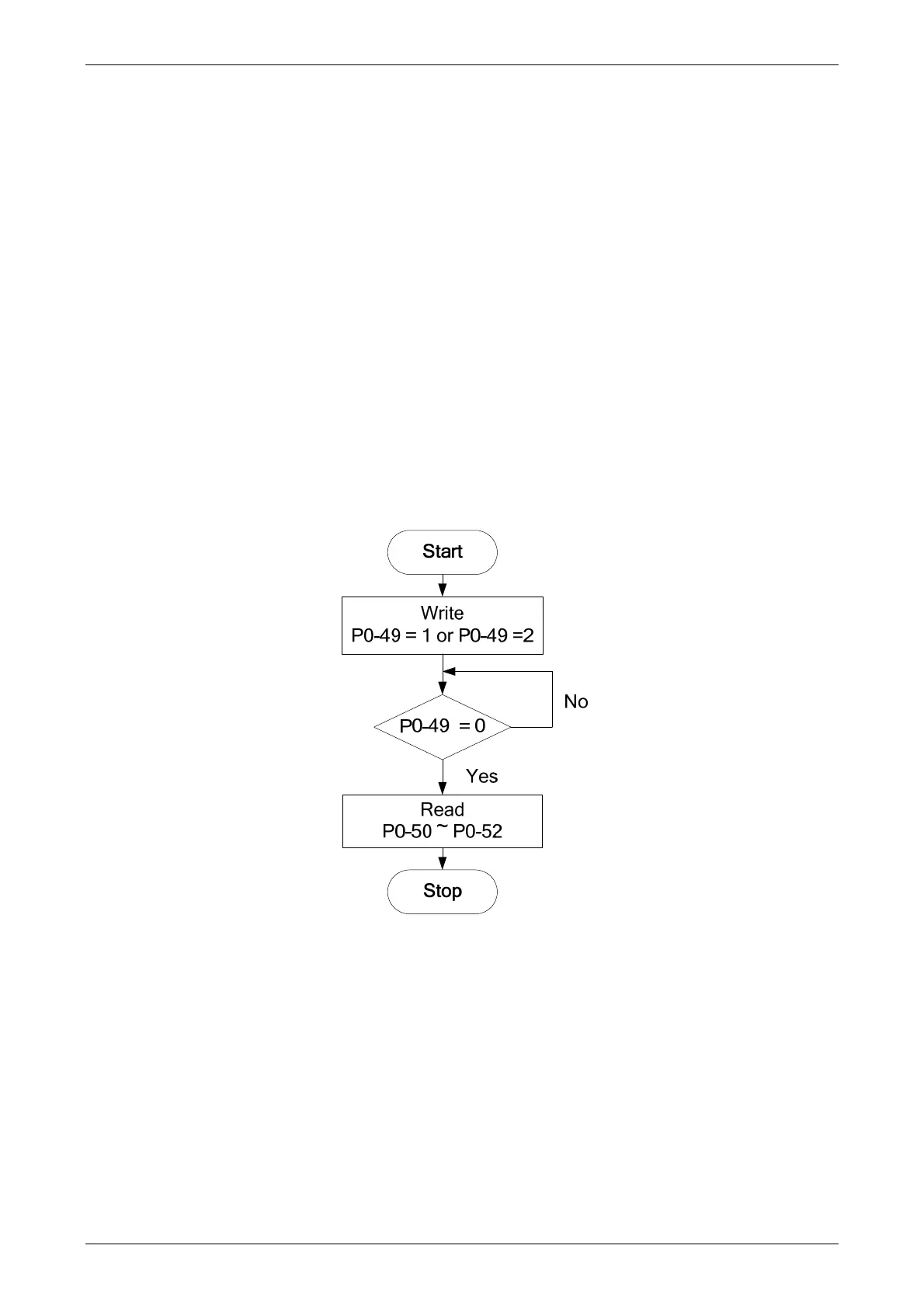
12.3.7 Use Parameter to Read the Absolute Coordinate Data
The servo drive will update its encoder status to P0-50 and encoder position to P0-51 and P0-52
when the parameter P0-49 is set. The Bit 1 of P2-70 is used to select which type of the data will be
read, PULSE or PUU. While the servo motor is stalling, it is always maintaining its position with a
very tiny forward and backward movement. At the moment the encoder data read, the coordinate
data in servo drive side will be reset to the current position of motor if P0-49=2 where it is just read
without changing any from the servo motor when P0-49=1. For example of P0-49=2, if the motor is
positioning at the place of 20000, it will move around position from 19999 to 20001 normally. The
command for reading the encoder data is put when the motor is at the place 20001, and the data
20001 will be read and the coordinate data in servo drive will be revised to 20001. There will avoid
the error from the data at encoder side and the data at drive side. The P0-49 will be reset to 0
when all the encoder data put in P0-50 to P0-52 is ready, and it means that the host controller can
get the data now. When the status already signals absolute coordinate data lost or overflow of
number for turns in P0-50, the values in P0-51 to P0-52 are not correct. A homing or system reset
procedure is necessary now.
 Loading...
Loading...
