Chapter 8 ParametersASDA-A2R Series
Revision December, 2014
8-79
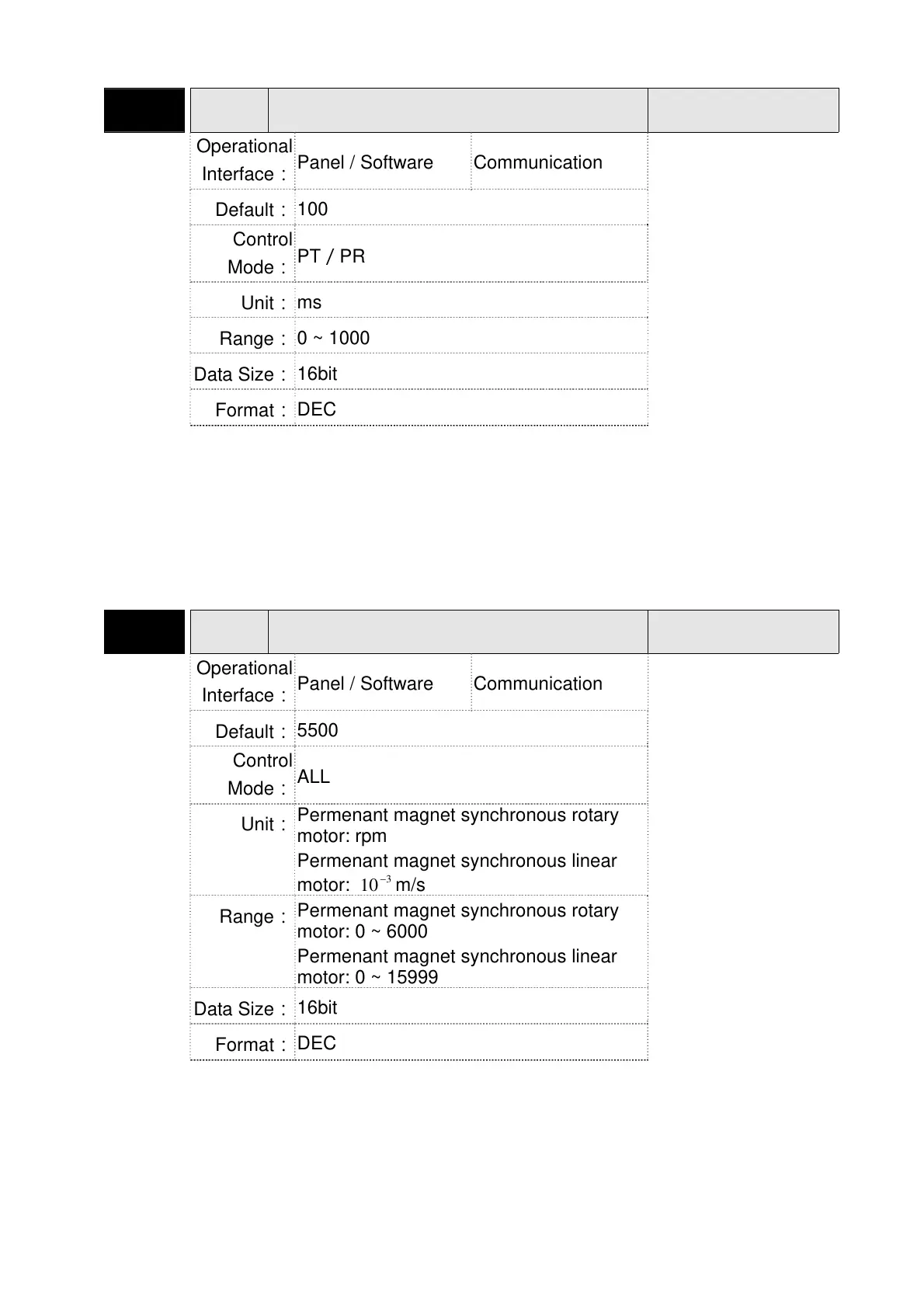
P1-75 FELP
Low-pass Filter Time Constant of
Full-closed Loop control
Address: 0196H
0197H
Operational
Interface:
Panel / Software Communication
Related Section: -
Default:
100
Control
Mode:
PT/PR
Unit:
ms
Range:
0 ~ 1000
Data Size:
16bit
Format:
DEC
Settings:
When the stiffness of mechanical system between full- and
half-closed loop is insufficient, users can setup the appropriate
time constant to enhance the stability of the system.
Set the value to 0 to disable the function of low-pass filter
(Bypass)
The stiffness of mechanical system ↑, the setting value of P1-75 ↓
The stiffness of mechanical system ↓, the setting value of P1-75 ↑
P1-76 AMSPD
Maximum Rotation of Encoder Output
Setting (OA, OB)
Address: 0198H
0199H
Operational
Interface:
Panel / Software Communication
Related Section:
P1-46
Default:
5500
Control
Mode:
ALL
Unit:
Permenant magnet synchronous rotary
motor: rpm
Permenant magnet synchronous linear
motor:
3
10
m/s
Range:
Permenant magnet synchronous rotary
motor: 0 ~ 6000
Permenant magnet synchronous linear
motor: 0 ~ 15999
Data Size:
16bit
Format:
DEC
Settings:
According to the real application, this parameter is set for the
maximum speed and the servo drive will generate smooth
function automatically for encoder output signals.
When the value is set to 0, the function is disabled.
 Loading...
Loading...
