3. Instruction Set
5. TarSpeed sets the maximum output frequency for the homing. The setting value is a signed
32-bit value. When Mode value is between 1~8, the range of the setting value is -200,000 ~
-100 (Hz) and 100 ~ 200,000 (Hz). If Mode value is 255, TarSpeed value will become the
present output position value of the PU module.
6. JogSpeed is the jog frequency for reaching the home position and also represents the
start/end frequency for homing. The setting value is a signed 16-bit value within the range of
1~10,000 (Hz).
7. When the specified home position is reached during the instruction is executed, the Done flag
changes to ON. The Done flag need be cleared by manual. The instruction sets the
completion flag to ON only when the output is completed.
8. The instruction does not support software limit points. It can be used with hardware limit points
only. When a hardware limit point is triggered during the output, the Error flag will be set to
ON.
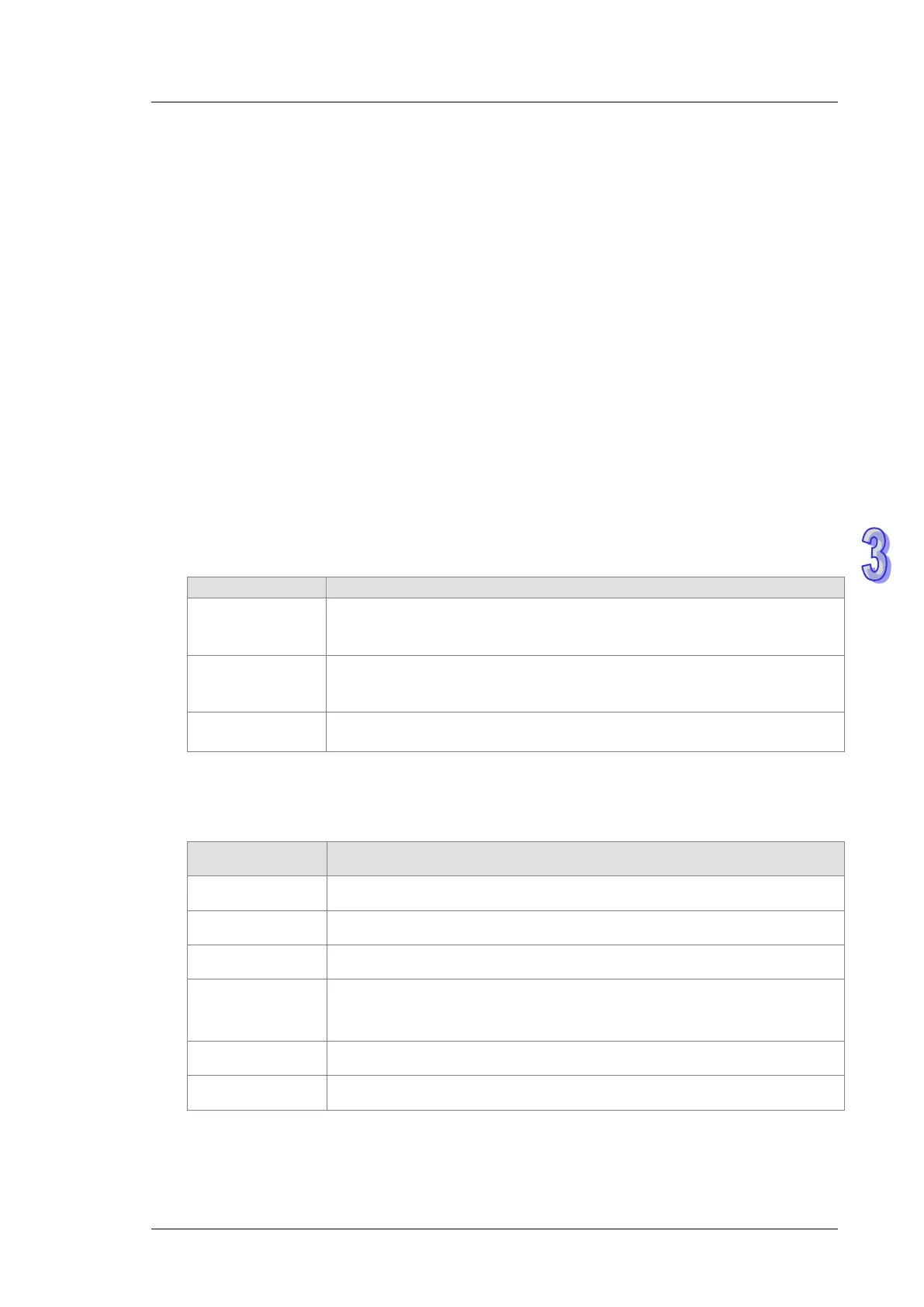
The following cases and corresponding axis actions occur when a hardware limit point is
triggered.
DOG is not
entered
The axis stops immediately, then speeds up toward the opposite direction
from the frequency specified by JogSpeed until the frequency specified
by TarSeed is reached and continues to seek the DOG signal.
At DOG
The axis stops immediately, then moves toward the opposite direction at
the frequency specified by JogSpeed and continues to seek the DOG
The axis stops immediately.
9. If any error occurs as the instruction is in process of the output, the Error flag changes to ON.
Refer to the error codes that ErrCode shows for the trouble shooting.
10. The error codes that ErrCode shows are listed in the following table.
Error code Description
16#1400 The module does not support the function.
16#1402 There is no response from the module; communication timeout occurs.
16#1403 There is no such output axis number in the PU module.
16#1405
The output axis specified by the PU module is outputting data. It is not
allowed to specify the output repeatedly.
16#1406 PU module stops Output pulse when the positive limit is reached.
16#1407 PU module stops Output pulse when the negative limit is reached.
 Loading...
Loading...









