40
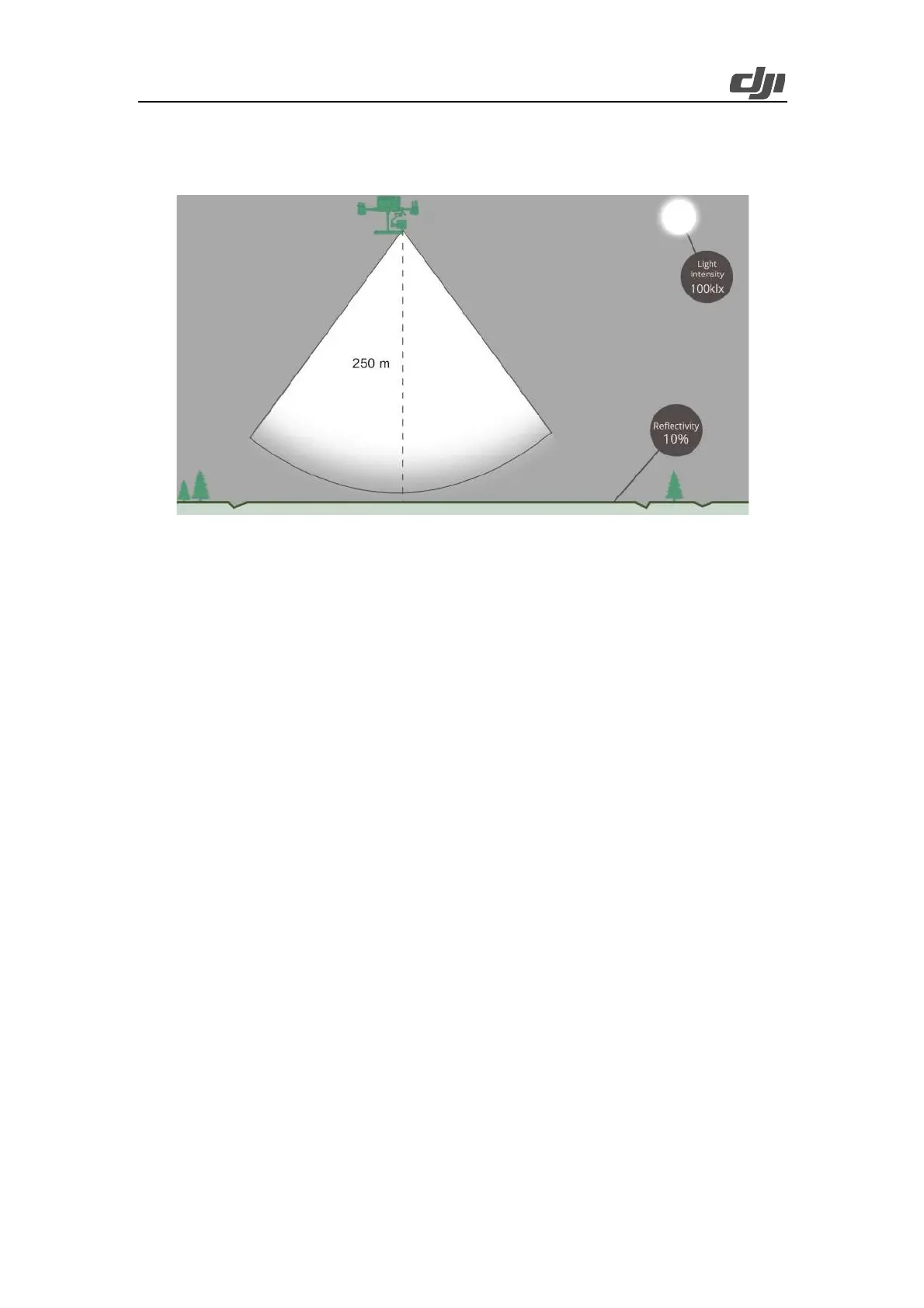
reflectivity is 10%. In actual use, vertical distance changes at different scan angles should also be
considered. The recommended vertical distance between the payload and the recorded subject is
between 20 m and 150 m.
Figure: Detection range
Note: It is not recommended to use Zenmuse L2 in scenarios as described below. Otherwise, the
detection range and accuracy of LiDAR may be reduced, leading to point cloud noise or voids.
Ø Conditions with low visibility such as rainy or foggy weather.
Ø Surfaces with strong reflectivity such as water or transparent surfaces, or fully reflective
objects or street signs in a close range (<20 m).
Ø The distance between Zenmuse L2 and the subject is less than 30 m in scenarios that
need high-precision modeling.
Ø The distance varies depending on the environment and accuracy requirement. For
example, point cloud data of power line scenarios can be recorded from 10 to 30 m.
3.1.4.5. Data Collection
Fly the aircraft near the subject and adjust the gimbal to a proper angle for data collection by
observing the camera view. Click the point cloud recording button to start recording. During a
manual flight, the recommended speed is 8-12 m/s and the recommended distance from the subject
is 50-100 meters. You can pause or start point cloud recording any time during collection. After the
aircraft flies at a consistent speed for 200 seconds, click Calibrate option to calibrate the IMU.