60
files and locate the positions where the cloud point effects are poor to determine the flight task
quality.
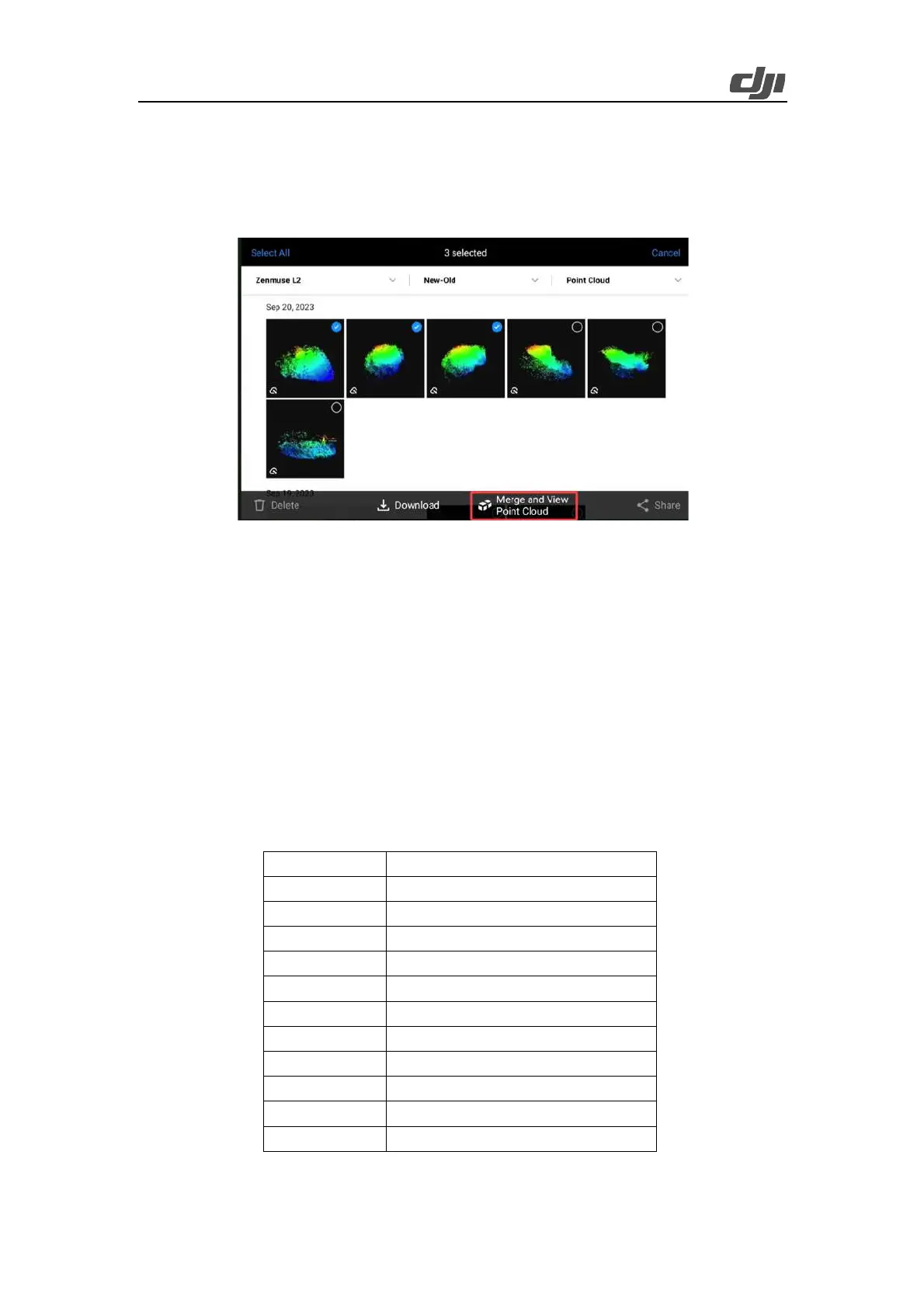
Ø Point cloud models collected from up to 12 flight tasks can be merged.
Ø Point cloud models collected within an area of up to 100 km × 100 km can be merged.
Figure: Merging of point cloud models collected from multiple flight tasks
3.2.4. Data Processing
3.2.4.1. Data Confirmation
3.2.4.1.1. Zenmuse L2 Data Confirmation
Remove the microSD card from Zenmuse L2. Insert the microSD card into a computer and check
the files. In the DCIM folder, the folder of each task contains files with the following suffixes. Check
whether all the files are contained.
Camera LiDAR calibration file
LiDAR IMU calibration file
LiDAR point cloud raw data
RTK data of auxiliary antenna
Compensation data of RTK pole
 Loading...
Loading...












