DOLD GMBH Operating instructions DMP 96 A
DMP 96 A Version: 020 Number of pages: 26
H0e020bA4.doc Edition: 07.11.2006
20
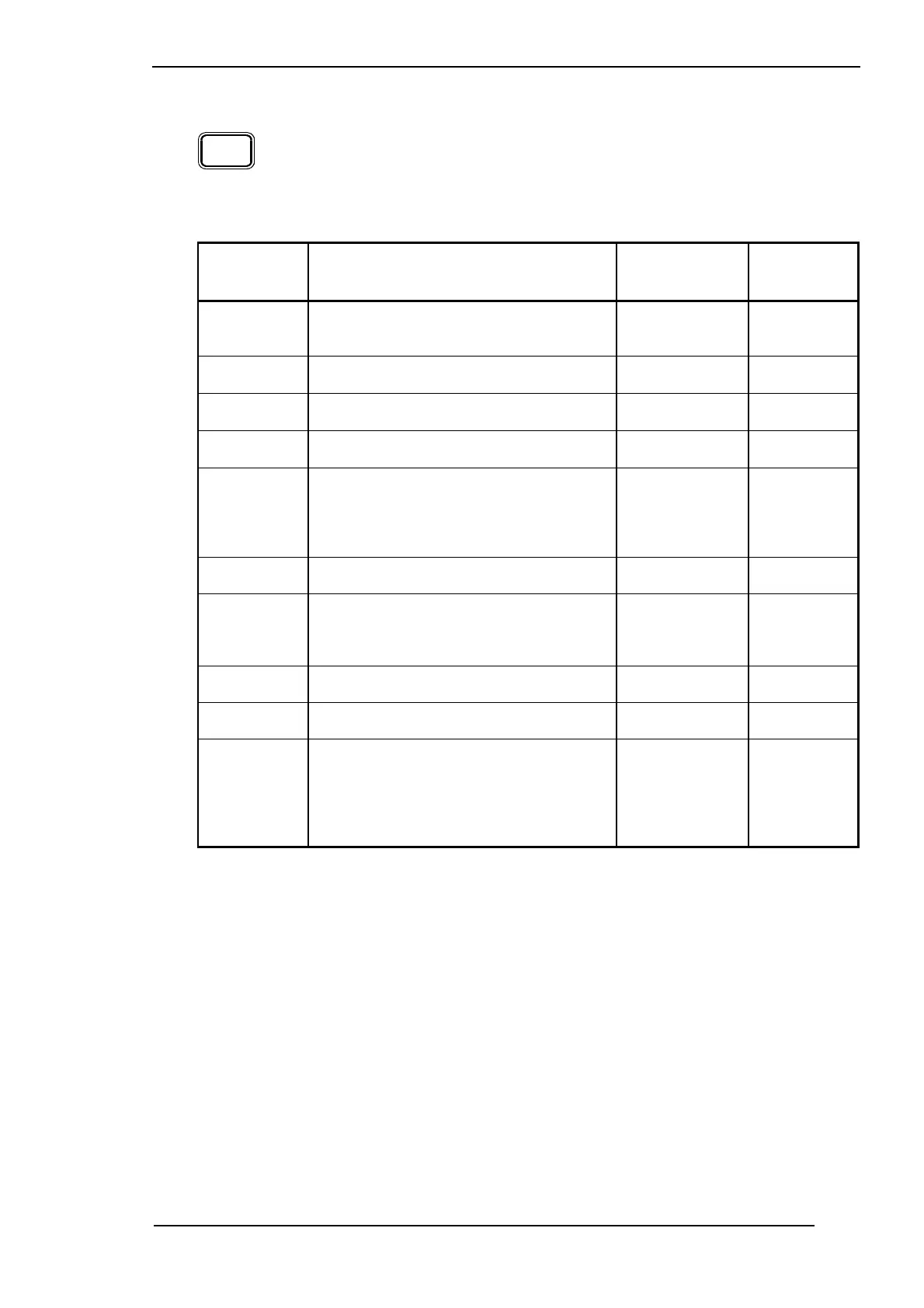
P
Jump to parameterization level.
Depending on the configuration of the outputs (configuration level) only those parameters are
accessible which are needed for the specific function.
Display: Parameter: Range: Factory
setting:
"Pb.1" Proportional band, control contact K 1
(Pb = 0.1...200% relative to setpoint ran
according to sensor ID, Section 2.1)
0.1...200%
"Co.1" = 02, 05
5.0%
"ti.1 " Reset time, control output K 1
(adjustment zero = time 0)
0...999 s
"Co.1" = 02, 05
250 s
"td.1" Derivative action time, control output K 1
(adjustment zero = time 0)
0...500 s
"Co.1" = 02, 05
50 s
"CY.1" Cycle time, control output K 1 1...200 s
"Co.1" = 02, 05
30 s
"HY.1" Hysteresis, control output K 1 0.1...5% of set-
point range limit
dependent on
sensor ID
"Co.1" = 01, 04
1.0 K
"bd.1" Symmetrical spreading, limit comparator
K 1 (hysteresis fix at 0.5 K)
0.1...99.9 K
"Co.1" = 03, 06
5.0 K
"LA.2" Absolute setpoint, limit-value contact K 2 max. display ran-
ge dependent on
sensor ID
"Co.2" = 01, 04
0.0 °C
"Lr.2" Spreading, limit-value contact K 2 travel-
ing with setpoint
-99...99.9 K
"Co.2" = 02, 05
0.0 K
"bd.2" Symmetrical spreading, limit comparator
K 2 (hysteresis fix at 0.5 K)
0.1...99.9 K
"Co.2" = 03, 06
5.0 K
"HY.2" Hysteresis, limit contact K 2 0.1...20% of set-
point range limit
dependent on
sensor ID
"Co.2" = 01, 02,
04, 05
1.0 K
7.6 The self-optimization level:
The DMP 96 A controller is equipped with an optimization routine for the automatic adaptation of
the controller to the controlled system.
The optimization algorithm is based on modified Ziegler-Nicols rules, according to which the cha-
racteristic data of the system are calculated after an oscillation test in a closed-loop control cir-
cuit.
These characteristic data (particularly period and amplitude of oscillation) form the basis for cal-
culating specific parameters.
Depending on the control function (heating controller or cooling controller), parameters are calcu-
lated for either the heating or the cooling side.