Owner's Manual
Drivecon Toll Free Ph: 1-800-374-8266
Drivecon reserves the right to alter or amend the above information without notice
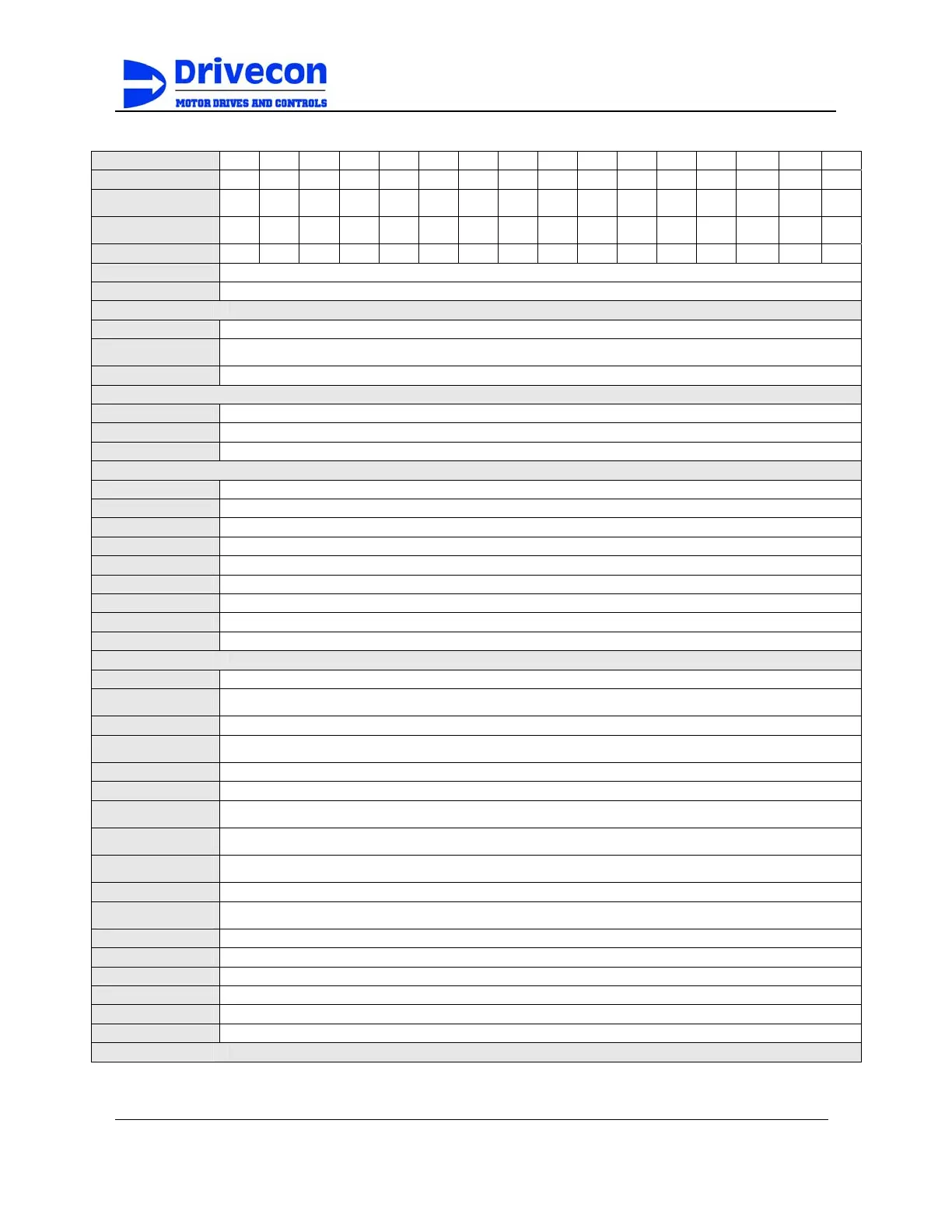
GENERAL - Technical data
Power class 4004 4005 4009 4012 4016 4022 4031 4038 4045 4061 4072 4087 4105 4140 4168 4210
Horsepower 2 3 5 7.5 10 15 20 25 30 40 50 60 75 100 125 150
Output capacity (kVA) at
460V
4.3 4.3 7.2 9.6 12.7 17.5 24.7 30.3 35.9 48.6 57.4 69.3 83.7 111.5 133.9 170
Nominal continuous output
current In (A)
4 5.4 9 12 16 22 31 38 45 61 72 87 105 140 168 210
Max. current 1min (A) 10 10 15 20 27 36 48 63 72 90 113 135 165 225 270 315
Overloadability 1.5 x In , 1min/10min / 2.5 x In , 2s/20s (<50% speed)
Max. output voltage Equal to supply voltage
Supply
Supply voltage 380-500VAC
Allowable voltage
fluctuation
+/- 10%
Nominal supply frequency 50/60Hz +/-5%
Signal input levels
Digital controls S1, S2, DIA3, DIA4, DIA5, DID1, DID2, DID3, DID4, DID5: 48 … 240VAC; 15mA
Analog references AIN1: +/- 10VDC, AIN2: 0-10VDC, 200 kOhm load.0.5% accuracy.
Encoder feedback EA+/-and EB+/-; 0/24V; 3k ohm load; floating differential inputs
Control features
Control method Open loop scalar, Open loop vector, Closed loop vector
Frequency control range 0-250Hz, 2 or 3 step infinitely variable, 2-5 preset speeds.
Frequency command Potentiometer, 0-10V analog signal
Limit switch functions Slowdown and stop limit inputs for both directions
Speed control range Open loop vector control. sN ... 100% (sN= motor nominal slip) Closed loop vector control. 0-100%.
Speed accuracy Open loop vector control. 1% of nominal speed at speed range 10- 100%. 1/3 of motor nominal slip at speed below 10%
Closed loop vector control. 0.01% of nominal speed.
Extended speed range Open loop vector control
Braking torque 1% of nominal speed at speed range 10 ... 100%
Protections
Stall prevention During acceleration and constant speed
Motor overload protection Thermistor based temperature measurement
Overload protection Fault is detected if the current momentarily exceeds 280% of rated current
Undervoltage / blown fuse Fault is detected if DC bus voltage drops below 65% of rectified supply voltage
Overvoltage protection Fault is detected if DC bus voltage exceeds 911V
Momentary power loss Immediate fault stop
Inverter overtemperature Temperature sensor on the heat sink
Mechanical brake control Control relay output. Control of braking chopper module and DB resistor.
Internal dynamic braking
transistor
Electronic supervision for the braking chopper and for the braking resistor
Ground fault detection Provided by built in electronic circuitry
Overspeed / stall, speed
difference supervision
Provided through SSU card and encoder feedback.
Ambient temperature 10°C ... +55°C (14°F ... 131°F) for ED?60%
Storage temperature 40°C ... +60°C (-31°F ... 140°F) dry
Humidity <95%RH (no condensation)
Altitude Maximum 3300 ft. at In. Above 3300 ft.: In reduces 1% per each 3300 ft. Above 9900 ft.: consult factory.
Vibration Operation: maximum displacement amplitude 0.12" at 2-9Hz.
Maximum acceleration amplitude 0.5g (16.5 f.t/sec.²) at 9-200Hz
Conforms to LV and EMC directives.
B-2