3
Owner's Manual
Drivecon Toll Free Ph: 1-800-374-8266
Drivecon reserves the right to alter or amend the above information without notice
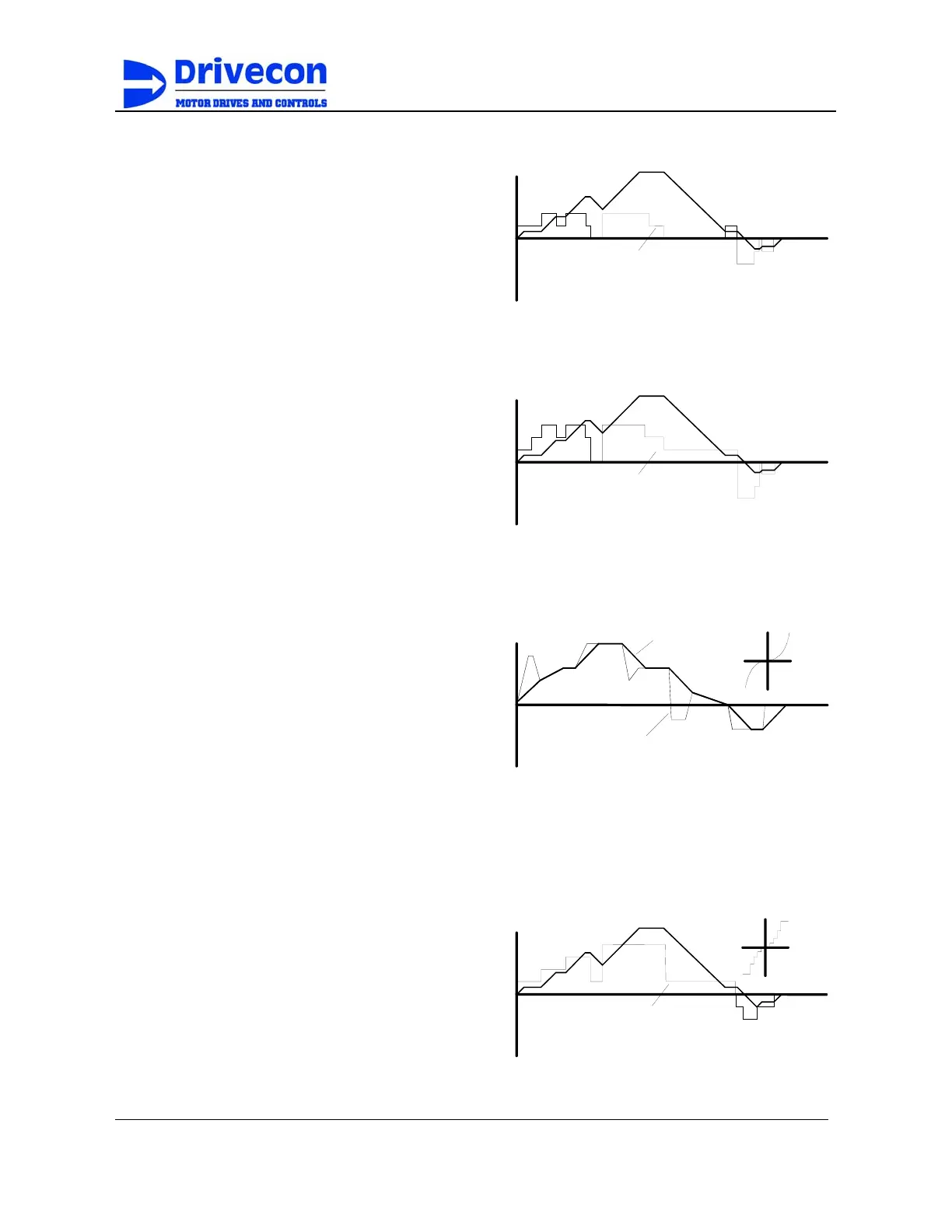
Description of the control methods
EP-control
requires two 2-step pushbuttons, one for
each direction. The operation is as follows:
−
the rest position means standstill (0-position)
−
during run the rest position means deceleration
−
step one (switch S1 or S2) means hold speed
−
when starting, step one means acceleration up to
the minimum speed
−
step two (switch AP) means acceleration (up to
the maximum speed if desired)
−
at the maximum speed step two means hold
speed, because the maximum speed cannot be
exceeded
Pushbutton position
rest = deceleration
step 1 = hold speed
step 2 = acceleration
speed
pushbutton
position
up / fwd
down / rev
time
EP-mode
EP3-control
requires a 3-step controller. The
operation is as follows:
−
the rest position means standstill (0-position)
−
step one (switch S1 or S2) is the minimum speed
command
−
step two (EP hold command) means hold speed
−
step three (switch AP) means acceleration (up to
the maximum speed if desired)
−
when releasing the controller, step one means
deceleration down to the minimum speed
speed
Pushbutton position
rest = stop
step 1 = minimum speed
step 2 = hold speed
step 3 = acceleration
pushbutton
position
up / fwd
down / rev
time
EP3-mode
PO-control
requires a controller with potentiometer.
The operation is as follows:
−
when the controller is at the rest position the
potentiometer is at the middle position causing
zero speed
−
run commands are controlled separately by
closing the direction switches (S1 and S2)
−
when the operator turns the controller to any
direction, the speed increases
−
the same turning angle of the controller causes a
smaller change in speed, the closer the speed is
to the minimum speed
AU-control
requires an analog reference from radio
or PLC. The operation is as follows:
−
the speed linearly follows the input signal. 0V
means zero speed and the higher the voltage, the
higher the speed
−
run commands are controlled separately by
closing the direction switches (S1 and S2)
up / fwd
down / rev
speed
speed
controller
position
time
potentiometer reference (controller position)
or auxiliary reference
PO- and AU-modes
MS-control
requires a 2-4-step controller. The
operation is as follows:
−
each step has its own frequency
−
the frequencies are freely selectable
−
when controller is set to a certain step, the speed
changes to equal value
speed
controller
position
up / fwd
down / rev
time
speed
controller
position
MS-mode