Appendix 3 Communication Protocol 117
EV2000 Series Universal Variable Speed Drive User Manual
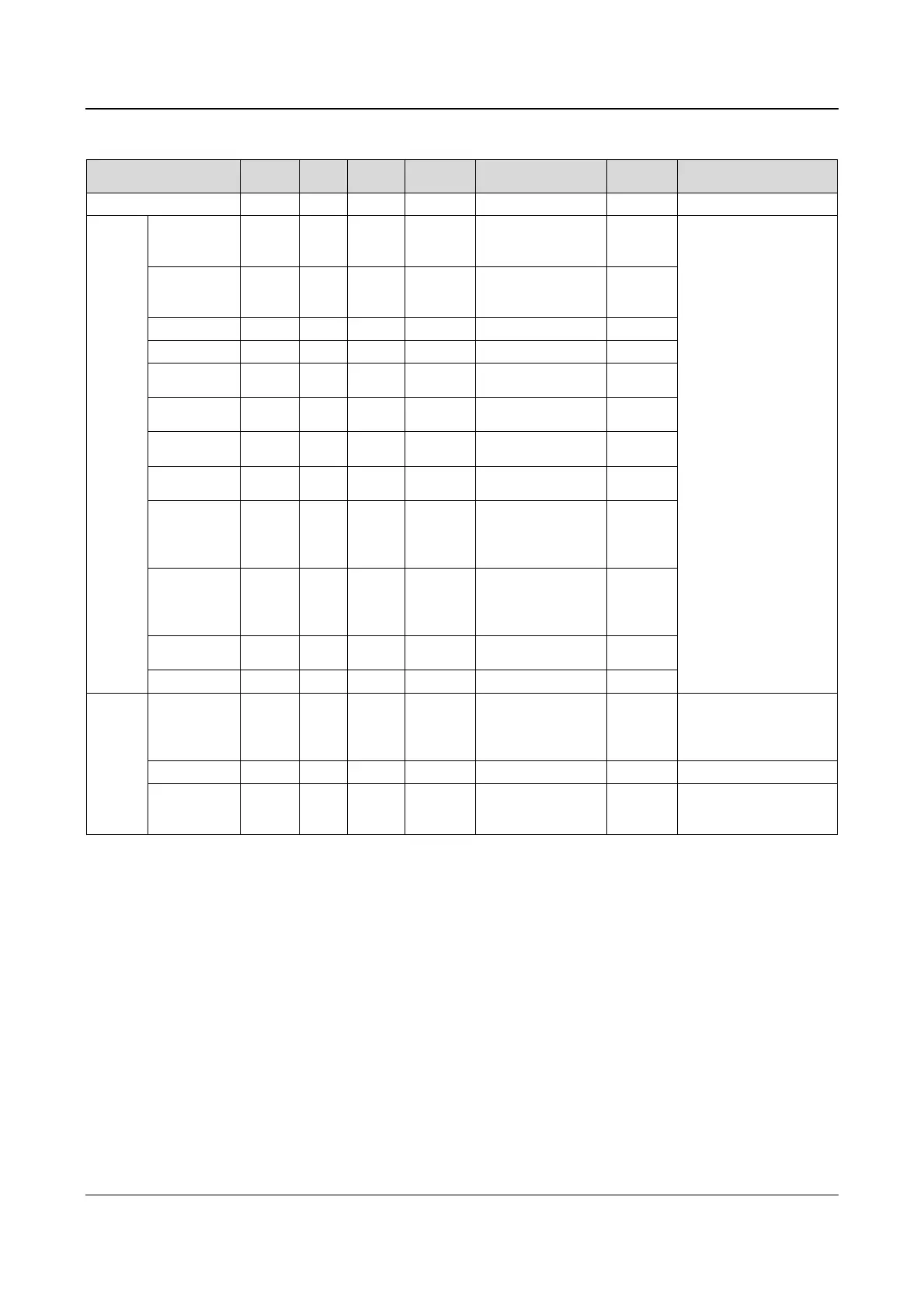
Table A-8 List of command protocol
Name
Command
of master
Auxiliary
index
Command
index
Setting
range
Example Accuracy Notes
Inquire the slave status
00 00 00 None ~010000000181\r 1 See table A-6
Read the slave’s parameters
Current
Operating
Frequency
01 00 00 None ~010100000182\r 0.01 Hz
Current
frequency
setting
01 00 01 None ~010100010183\r 0.01 Hz
Output voltage
01 00 02 None ~010100020184\r 1V
Output current
01 00 03 None ~010100030185\r 0.1A
Displayed value
without units
01 00 04 None ~010100040186\r 1
Preset rotating
speed
01 00 05 None ~010100050187\r 1rpm
Running line
speed
01 00 06 None ~010100060188\r 0.01m/Min
Preset line
speed
01 00 07 None ~010100070189\r 0.01m/Min
Close loop
feedback of
analog close
loop control
01 00 08 None ~01010008018A\r 0.01V
Close loop
setting of
analog close
loop control
01 00 09 None ~01010009018B\r 0.01V
External
counting value
01 00 0A None ~0101000A0193\r 1
Output torque
01 00 0B None ~0101000B0194\r
0.1%
Read the slave’s
parameters
I/O status 01 00 0C None ~0101000C0195\r 1
Bit0~14, respectively are
X1~X8, Y1, Y2, TC, fan,
braking signal, FWD and
REV
Present status 01 00 0D None ~0101000D0196\r 1 See table A-9
Operating
frequency after
compensation
01 00 14 None ~010100140187\r 0.01 Hz

 Loading...
Loading...

