Chapter 5 Parameter Introductions 47
EV2000 Series Universal Variable Speed Drive User Manual
①Use the pulse signal input via terminal to set the
reference frequency;
②Range of input signal frequency:1kHz~20kHz;
③1kHz input signal corresponds to 50Hz reference
frequency, and 20kHz input signal corresponds to 5Hz
reference frequency;
According to the above requirements, the parameter
settings are:
①F0.00=5, select pulse input to set the reference
frequency;
②F7.06=45, input pulse signal via terminal X7;
③F1.00=100, select curve 2;
④F1.03=20.0kHz, set the Max input pulse frequency to
20kHz;
⑤F1.08=1÷20×100%=5.0%, the minimum reference of
curve 1 is actually the percentage of 1kHz to
20kHz(F1.03);
⑥F1.09=50.00Hz, set the frequency that corresponds to
the Min reference (1kHz pulse signal);
⑦F1.10=20÷20×100%=100.0%, the Max reference of
curve 2 is actually the percentage of 20kHz to
20kHz(F1.03);
⑧F1.11=5.00Hz, set the frequency that corresponds to
the Max reference (20kHz pulse signal);
Pulse signal
input
F0.00=5, F1.00=100, F1.03=20, F7.06=45
Output
frequency
F1.09=50
F1.11=5
F1.08=5
F1.10=100
Fig. 5-10 Pulse signal input
5.3 Starting and Braking Parameters
(Group F2)
F2.00 Starting mode
Range:0. 1. 2【0】
0: Start from the starting frequency
Start at the preset starting frequency (F2.01) within the
holding time of starting frequency (F2.02).
1:Brake first and then start
Brake first(refer to F2.03 and F2.04), and then start in
mode 0.
2. Start on the fly
Search and catch the motor’s running direction and
speed, start the rotating motor smoothly without impact,
as shown in Fig. 5-11.
AC supply
Motor speed
On
0
Run reverse
without load
Drive's
output freq.
Drive's running
direction
Forward
Reverse
Detect motor's speed
and direction
OFF
ON
Fig. 5-11 Start on the fly
Notes:
1. Starting mode 1 is suitable for starting the motor that is
running forward or reverse with small inertia load when the
drive stops. For the motor with big inertial load, it is
recommended to use starting mode 2;
2. The starting performance of starting mode 2 is dependent
on the motor’s parameters. Please set the parameter group
FH correctly.
3. Starting mode 0 is recommended when the drive drives a
synchronous motor.
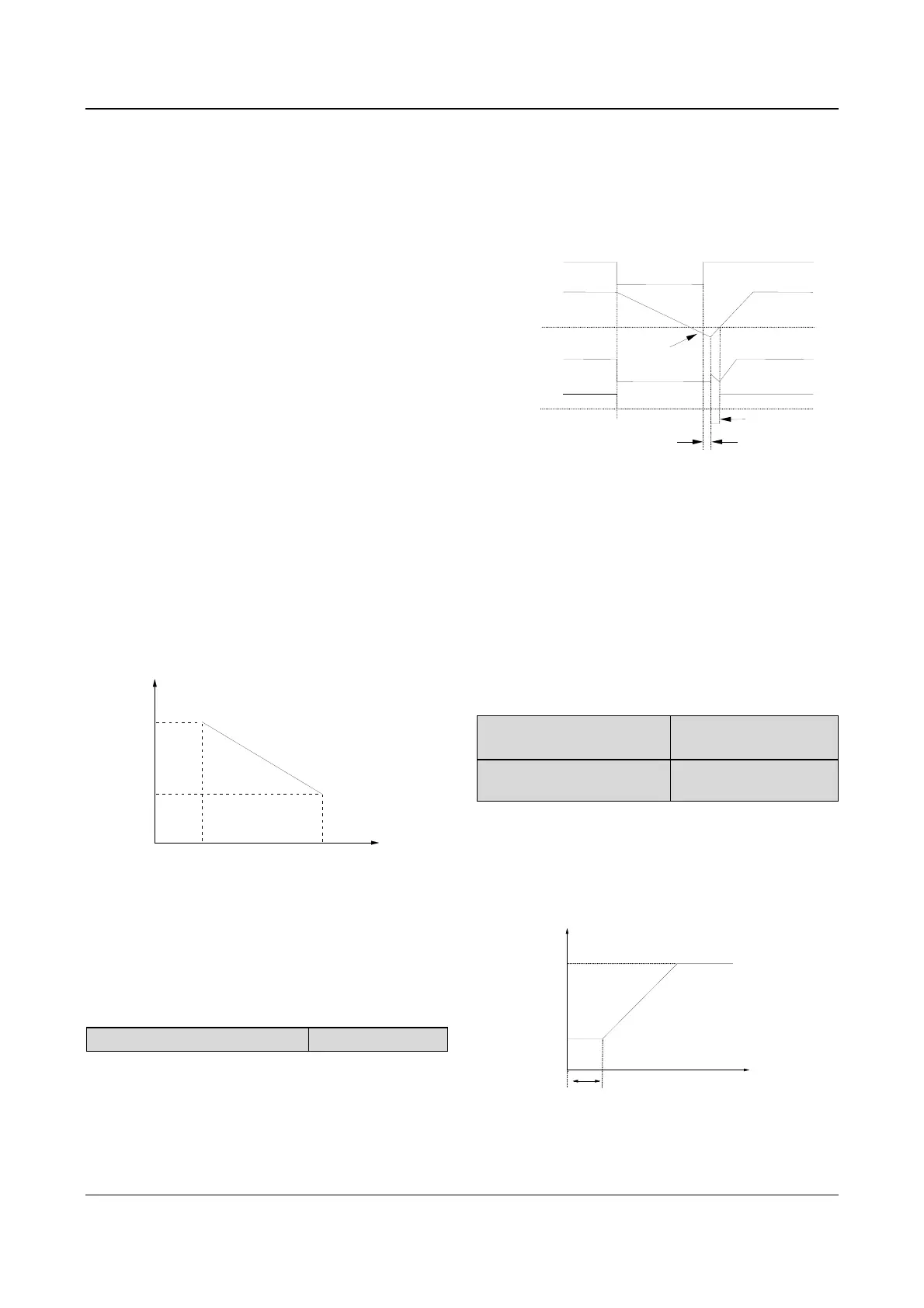
F2.01 Starting frequency
Range:0.20~60.00Hz
【0.50Hz】
F2.02 Holding time of starting
frequency
Range:0.0~10.0s【0.0s】
Starting frequency is the initial frequency when the drive
starts, as shown in Fig. 5-12 as f
S
; Holding time of
starting frequency is the time during which the drive
operates at the starting frequency, as shown in Fig. 5-12
as t
1
t
1
Time
f
s
f
max
Frequency
Hz
Fig. 5-12 Starting frequency and starting time