Chapter 5 Parameter Introductions 75
EV2000 Series Universal Variable Speed Drive User Manual
the CCI input current until CCI input current reaches or
exceeds the preset value of Ib, or the preset frequency
reaches fb.
Stopping process:
The drive will not stop immediately when the CCI input
current is reduced to Ib. It will stop its output when the
CCI input current drops to Ia and the corresponding
frequency is fa.
“fa” is the zero-frequency operation threshold defined by
F9.12. “fb-fa” is the hysteresis of zero-frequency
operation defined by F9.13.
This function can enable the drive to enter dormant state
so as to save energy, besides, the drive will not start at
the threshold of zero-frequency operation if the
hysteresis is set properly.
0
Actual
frequency
setting
Primary frequency setting
fa fc fb
CCI current input
Imax
Imin
Ib
Ia
Ic
Fmin
Fmax
fa: Zero frequency threshold
fb: fa+ zero freq. hysteresis
fc: Freq. corresponding to Ic(CCI input)
primary frequency setting
Fig. 5-67 Hysteresis of zero-frequency operation
F9.14 Preset length
Range:0.000~65.535km
【0.000km】
F9.15 Actual length
Range:0.000~65.535km
【0.000km】
F9.16 Rate of length
Range:0.001~30.000【1.000】
F9.17 Correction
coefficient of length
Range:0.001~1.000【1.000】
F9.18 Perimeter of shaft
Range:0.01~100.00cm
【10.00cm】
F9.19 Number of pulses
per revolution
Range: 1~9999【1】
This group of parameters are used for fixed length
control.
The drive inputs counting pulses via terminals (X7 or X8,
defined as function 44), and calculate length according
to the number of pulses per revolution (F9.19) and
perimeter of shaft (F9.18).
Calculated length
=Number of pulses÷number of
pulses per revolution
×perimeter of shaft
The calculated length can be corrected through F9.16
(times of length) and F9.17(correction coefficient of
length, and the corrected length is the actual length.
Actual length
=calculated length×F9.16÷correcting
coefficient of length
When actual length(F9.15)
≥preset length(F9.14), the
drive will send out a STOP command to stop the drive.
When the drive restarts, it needs to clear or modify the
actual length (F9.15), otherwise the drive will not start.
Note:
The actual length (terminal Xi is defined as No.39 function)
can be cleared by multi-function input terminal. The actual
length can be calculated only after this terminal is
disconnected.
Actual length (setting of F9.15) will be saved after power
off automatically.
Function of stopping at fixed length is disabled if F9.14 is
set to 0, but the calculated length is still effective.
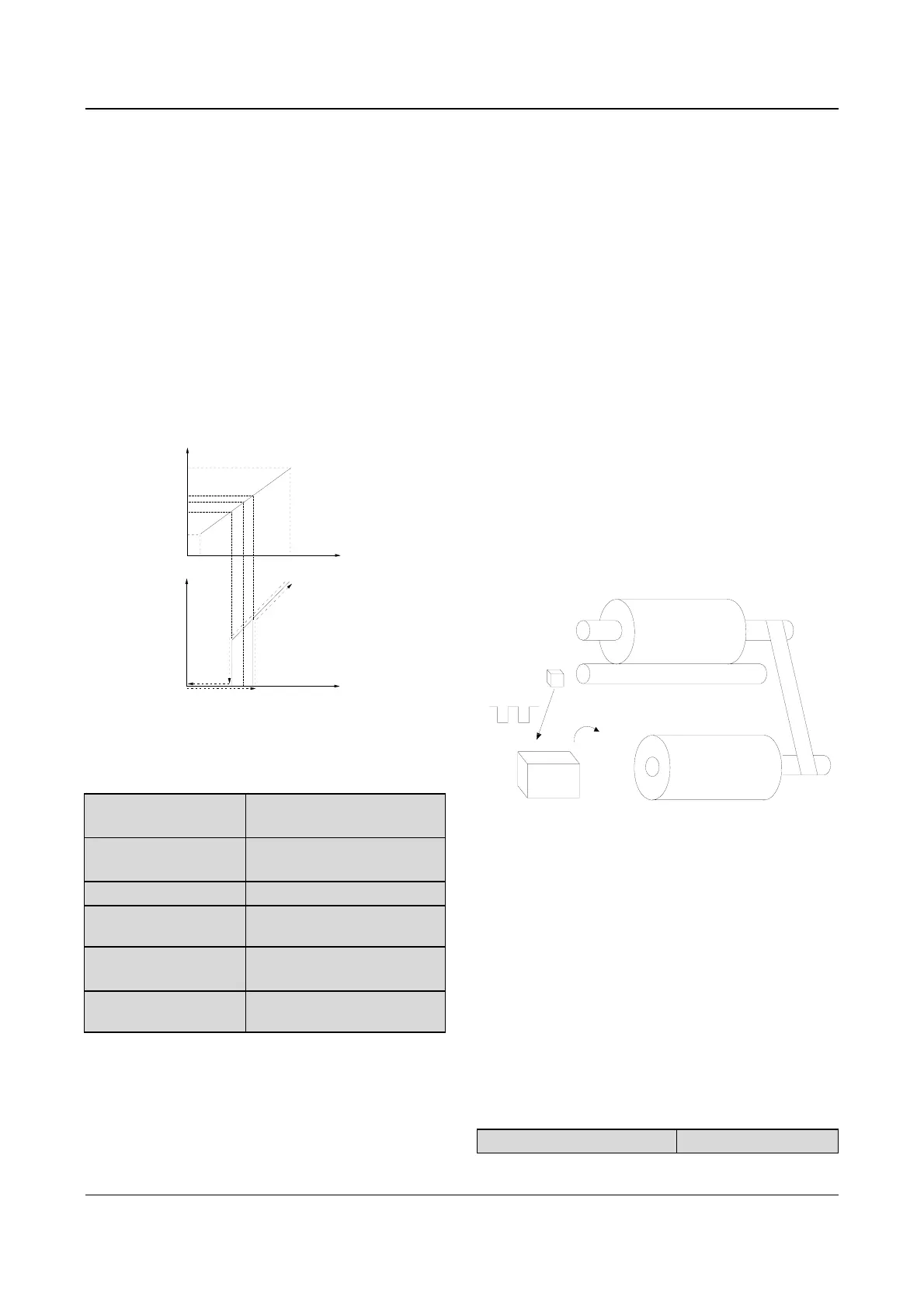
An example of stopping the motor at fixed length:
Drive
Motor
Spindle
Speed measuring shaft
Speed
sensor
Fig. 5-68 Fixed length control application
In Fig. 5-68, a drive drives a motor that rotates a spindle
via a conveyor belt. Speed measuring device measures
the line speed of the spindle and send the speed signal
to the drive in the form of pulses. The drive will count the
pulses and calculate the actual length. If the actual
length is longer than the preset length, the drive will stop
the motor automatically. The operator can remove the
spindle and close the terminal that is defined as function
39 to clear the length, and then restart and produce the
next spindle.
Note:
Functions of stopping the motor at a fixed length are only
valid for the drive of 45kW or below.
F9.20 Trip-free operation
Range:0. 1【0】