Controller
WAVELIN
With the
WAVELIN
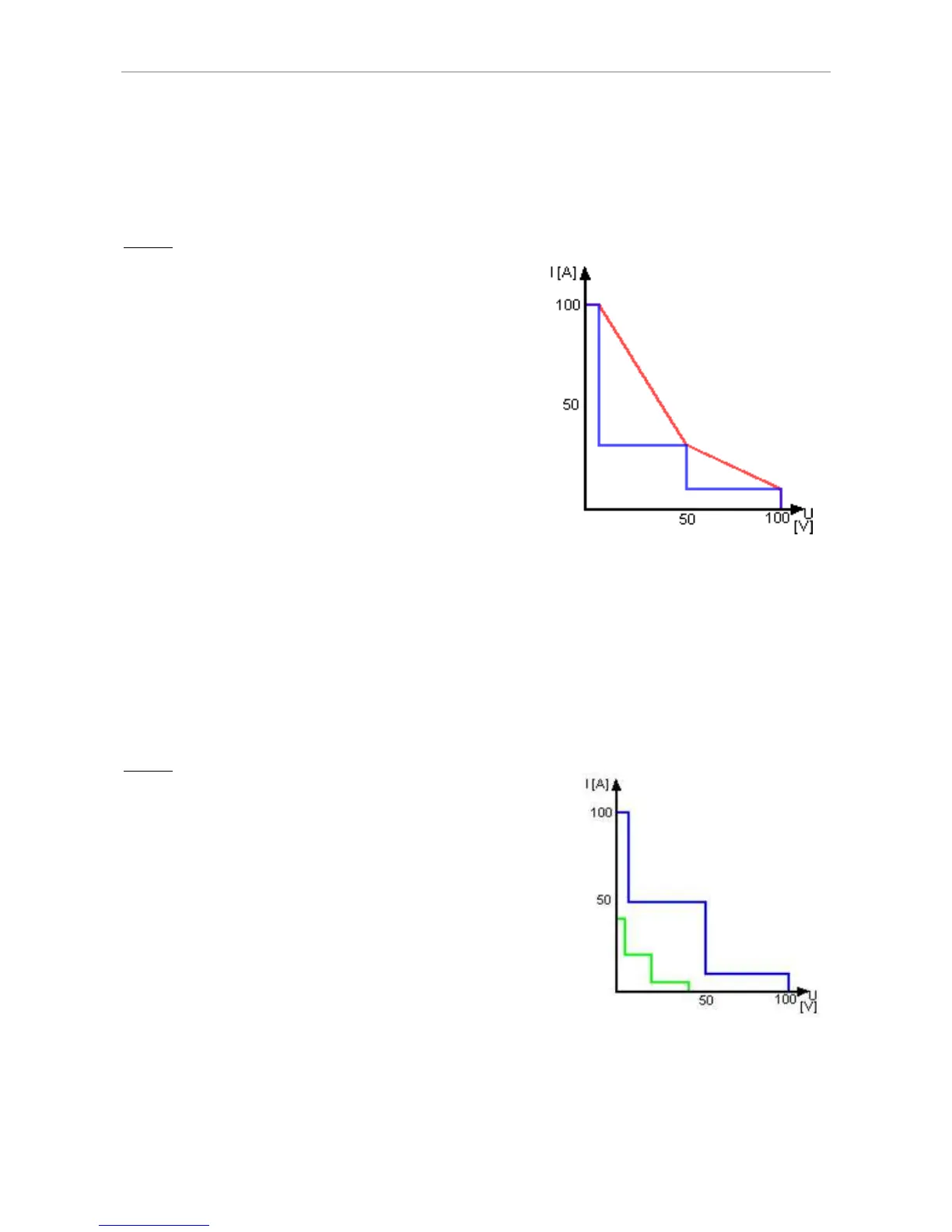
command, the interim values between the fulcrums are linear interpolated, with the
WAVE
command they are layered (see example). Characteristics which are not constant or negative in their course are
accepted but the behavior of the unit may not be predicable.
Example:
; Characteristic with layered interim values
; This script delivers the blue characteristic in the diagram
WAVE ; Start of the table
100 10 ; 100 V 10 A
50 25 ; 50 V 25 A
10 100 ; 10 V 100 A
-WAVE ; End of the table
RUN ; Output active
; Characteristic with linear interim values
; This script delivers the red characteristic
WAVE ; Start of the table
100 10 ; 100 V 10 A
50 25 ; 50 V 25 A
10 100 ; 10 V 100 A
-WAVELIN ; End of the table
RUN ; Output active
If output voltage or output current is changed afterwards, the characteristic keeps its course. Though values are
stretched or compressed to the new range.
Example:
# This script generates a blue characteristic
# After a 10 second delay it switches to the green characteristic:
WAVE # Start of the table
100 10 # 100 V 10 A
50 50 # 50 V 50 A
10 100 # 10 V 100 A
-WAVE # End of the table
U 100 # Output Voltage 100 V
I 100 # Output Current 100 A
USER # Select characteristic
RUN # Output open
DELAY 10000 # Wait 10 seconds
U 50 # Output Voltage 50 V
I 50 # Output Current 50 A
CONTROLLER
The software contains three digital PID controllers. Each controller is assigned to the UIR, UIP and PVsim mode. When
required, the controller parameters can be changed via universal interface.