2 Description of the safety function STO
Festo – GDCP-CMMS-AS-G2-S1-EN – 1306NH – English 25
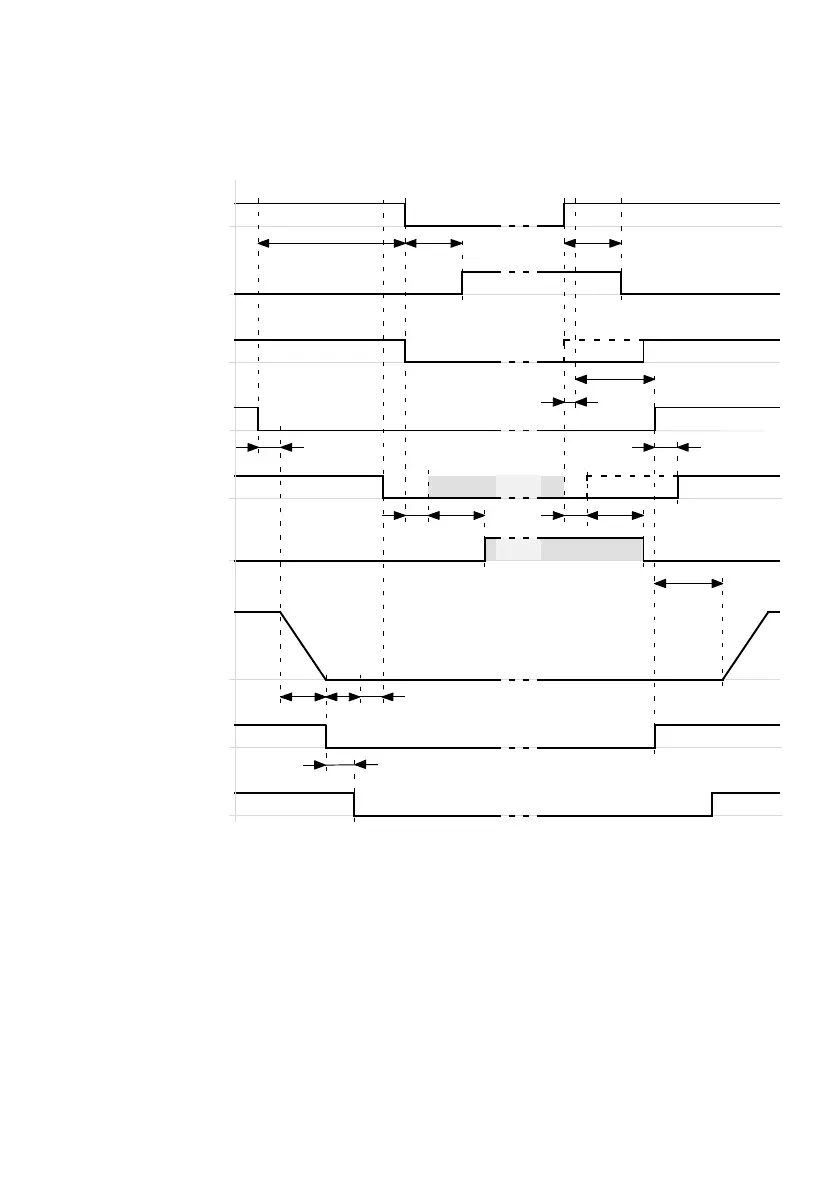
2.4.4 Timing diagram SS1
Controller enable
DIN5 [X1.9]
Output stage
enable DIN4
[X1.21]
Actual speed
value
Output stage
active
Open holding
brake BR+ [X6.2]
Holding brake
open (mechanical)
t1
7-segment display
t2
t
STO
Acknowledgment
contact NC1/NC2
[X3.5/6]
Driver supply relay
Rel [X3.2]
t6
Safe Torque Off
t7
‘H’
t6
t11
t9
t8
t13
t3 t4
t5
t7
t12
Open
Closed
Open
t10
t1 ≤ 5ms
t2 = 0 ms…10 s (dependent on the actual speed
value and quick-stop delay parameterised
with FCT)
t3 = 0…6553 ms (switch-off delay brake
parameterised with FCT)
t4 ≤ 5ms
t5 time delay PNOZ (> t1 + t2 + t3 + t4)
t
STO
≤ 12 ms
t6 ≤ 30 ms
t7 ≤ 720 ms
t8 ≤ 20 ms
t9 any
t10 > 2.5 ms
t11 ≤ 5 ms (For control via the fieldbus,
controller enable via fieldbus is also required
beforehand)
t12 = 50…500 ms (dependent on the brake used)
t13 = 0…6553 ms (with FCT parameterised
switch-on delay brake)
Fig. 2.6 Timing diagram SS1
 Loading...
Loading...









