Franka Emika GmbH ©October 2018
89
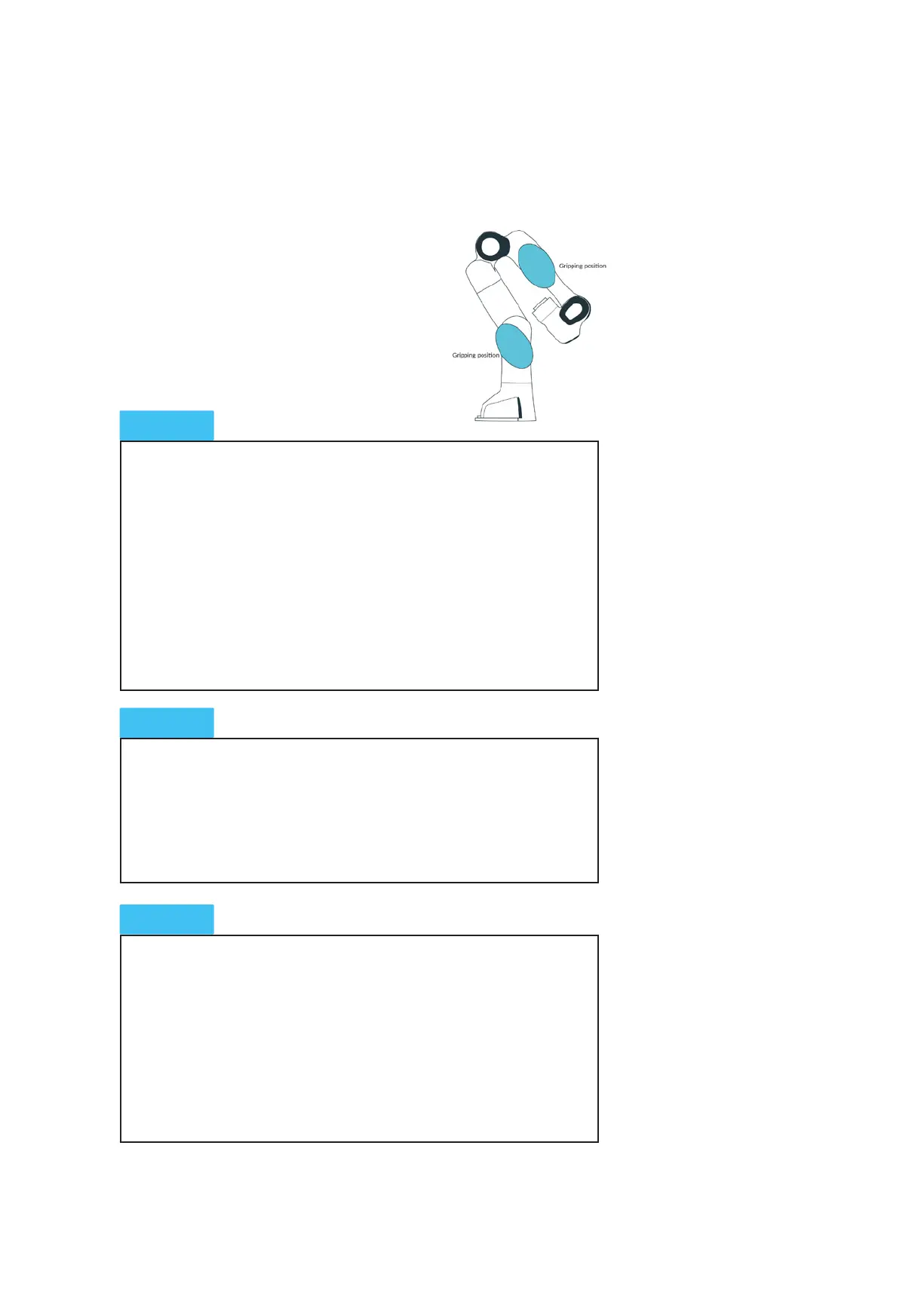
Always li the Arm in the posions intended for
liing, as not to overstress the joints of the Arm
during handling and liing. In parcular, the Arm
may never be carried in extended posion with
one person holding each end of the Arm!
NOTICE
The Arm and Control contain sensive electromechanical components. These
can be decalibrated or damaged by shock.
Therefore:
• Avoid shocks or seng the device down roughly
• Always store and transport devices in their original packing, even during
transport inside buildings.
NOTICE
The Arm contains sensive mechanical and mechatronic components. These
can be decalibrated or damaged due to wrong handling or misuse!
Therefore:
• The Arm may only be handled, lied and transported at the points indi-
cated in this manual in order to avoid overstressing the joints of the Arm
• The Arm is to be handled gently even when mounted and switched
on or o. If, for example, the Arm is moved by force when in stopped
and locked state, an internal safety system is triggered and will cause
a momentary slipping of internal components. This slipping causes
decalibraon and damage to the Arm.
NOTICE
The Arm and Hand contain sensive electromechanical components. These
can be damaged if the Arm is moved to adopt the transport posion while the
end eector is sll aached! Furthermore, when moving into transport posi-
on, objects in the operang area of the Arm may be damaged.
Therefore:
• Make sure that the end eector has been dismounted before bringing
the Arm into the transport posion.
• Make sure that the operang area allows to bring the Arm into transport
posion safely.