Franka Emika GmbH © October 2018
94
NOTICE
NOTICE
The Arm contains sensive mechanical and mechatronic components. These
can be decalibrated or damaged due to wrong handling or misuse!
Therefore:
• The Arm may only be handled, lied and transported at the points
indicated in this manual in order to avoid overstressing the joints of the
Arm
• The Arm is to be handled gently even when mounted and switched
on or o. If, for example, the Arm is moved by force when in stopped
and locked state, an internal safety system is triggered and will cause a
momentary slipping of internal components.
This slipping causes decalibraon and damage to the Arm.
The Arm and Control contain sensive electromechanical components. These
can be decalibrated or damaged by shock!
Therefore:
• Avoid shocks or seng the device down roughly
• Always store and transport devices in their original packing, even
during transport inside buildings
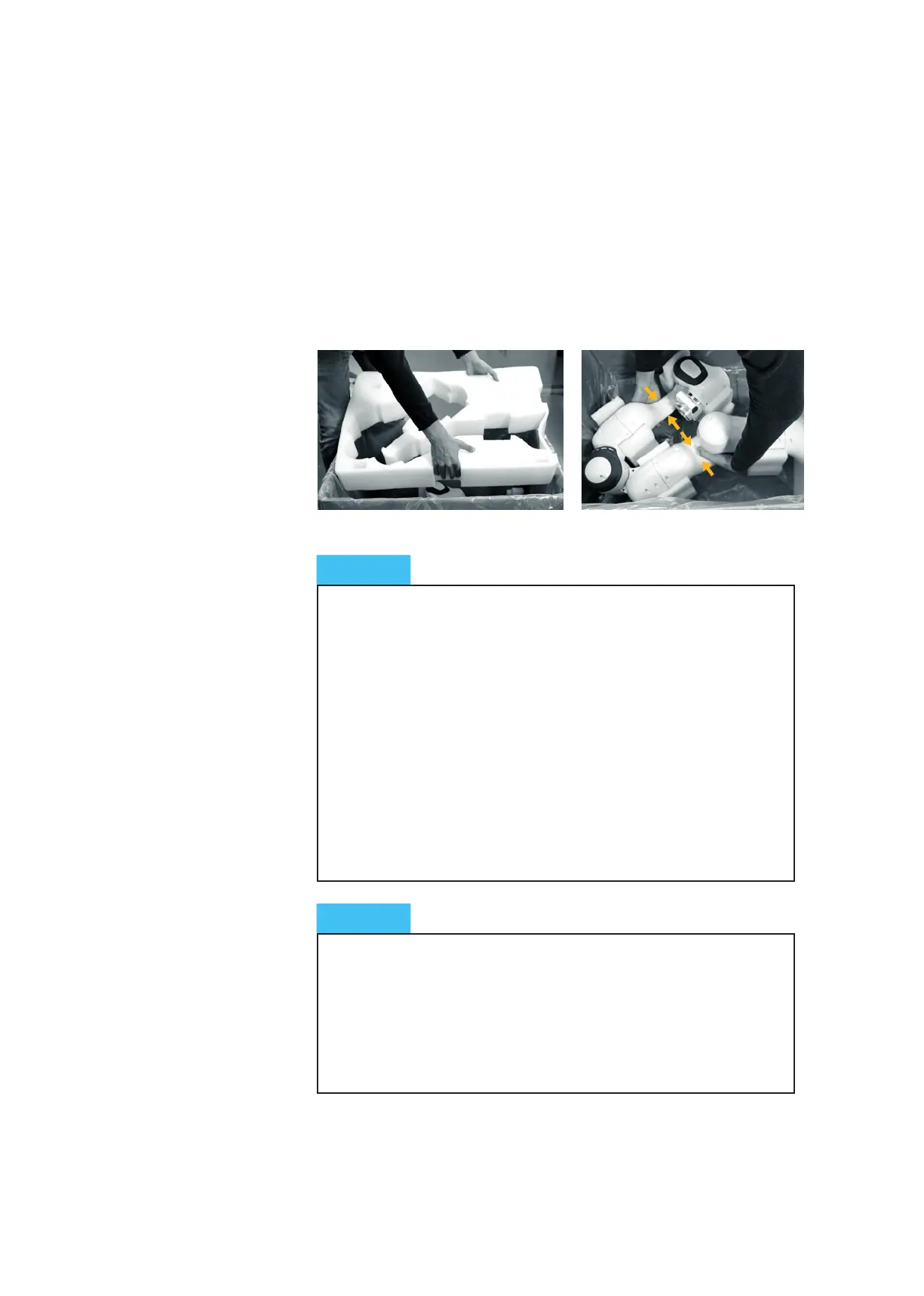
• First carefully remove the foam layer that is surrounding the Arm.
• Than grasp the Arm at the indicated grasping posion and carefully li it out
of the box. We recommend doing this together with another person to help
you, because the Arm weighs approx. 18kg.
MOUNTING & INSTALLATION