GE Multilin M60 Motor Protection System 6-17
6 ACTUAL VALUES 6.3 METERING
6
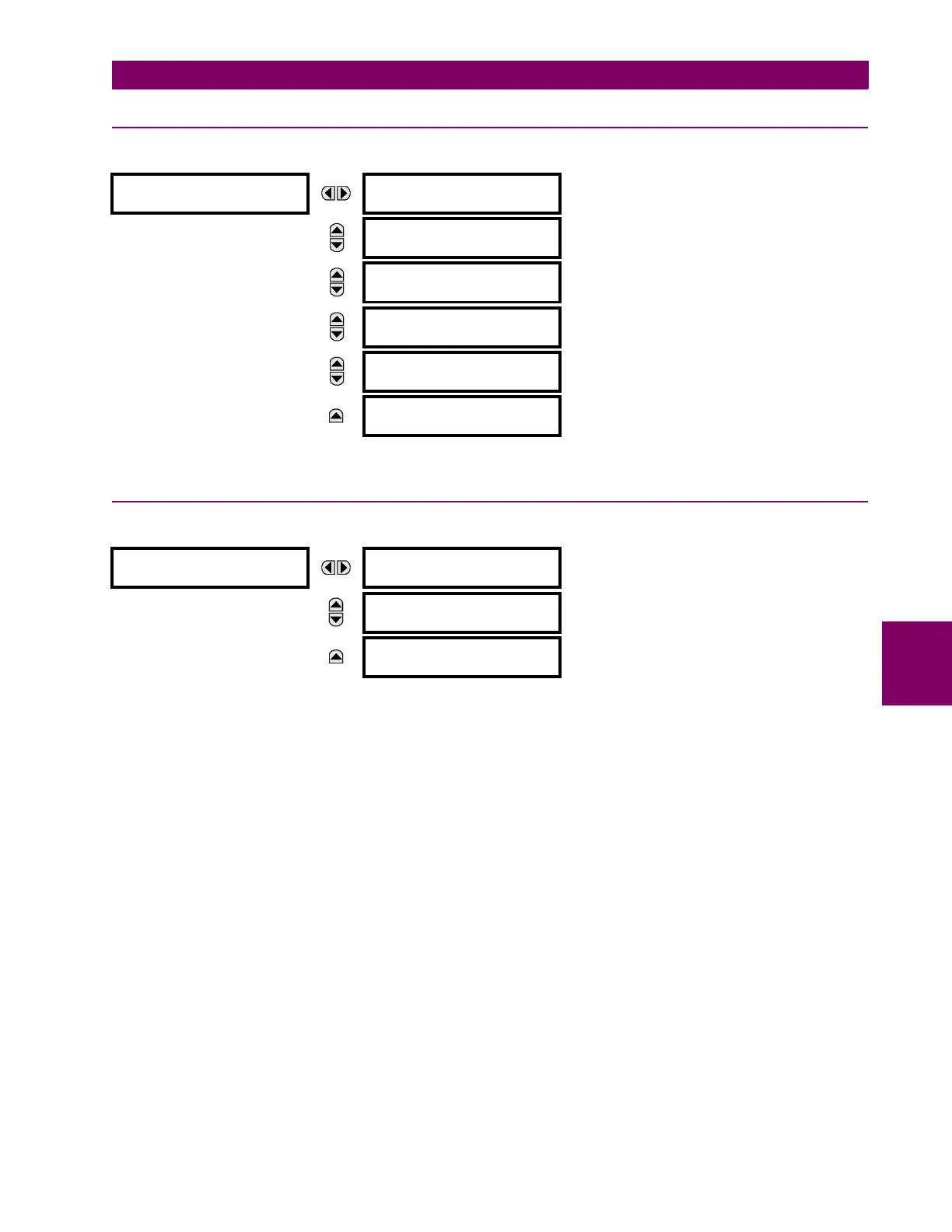
6.3.2 STATOR DIFFERENTIAL
PATH: ACTUAL VALUES METERING STATOR DIFFERENTIAL STATOR DIFFERENTIAL
The phasors of differential and restraint currents are displayed in primary amperes.
6.3.3 MOTOR
PATH: ACTUAL VALUES METERING MOTOR
There are three metered values available for the motor.
• MOTOR LOAD: This value represents the measured three phase average RMS current from the line source divided by
the Full Load Amps setting, in per unit.
• MOTOR UNBALANCE: This value is the amount of unbalance in the motor currents. A full explanation of the calcula-
tion of this value is presented for the Amp Unbalance element
• U/B BIASED MOTOR LOAD: Unbalance Bias Motor Load shows the equivalent motor heating current caused by the
unbalance k factor.
STATOR
DIFFERENTIAL
STATOR DIFF OPERATE
Iad: 0.00 A
MESSAGE
STATOR DIFF RESTRAIN
Iar: 0.00 A
MESSAGE
STATOR DIFF OPERATE
Ibd: 0.00 A
MESSAGE
STATOR DIFF RESTRAIN
Iar: 0.00 A
MESSAGE
STATOR DIFF OPERATE
Icd: 0.00 A
MESSAGE
STATOR DIFF RESTRAIN
Icr: 0.00 A
MOTOR
MOTOR LOAD:
0.00 x FLA
MESSAGE
CURRENT UNBALANCE:
0%
MESSAGE
U/B BIASED MOTOR
LOAD: 0.00 x FLA

 Loading...
Loading...









