93
Program description: Swashplate mixers – model helicopter
SEL
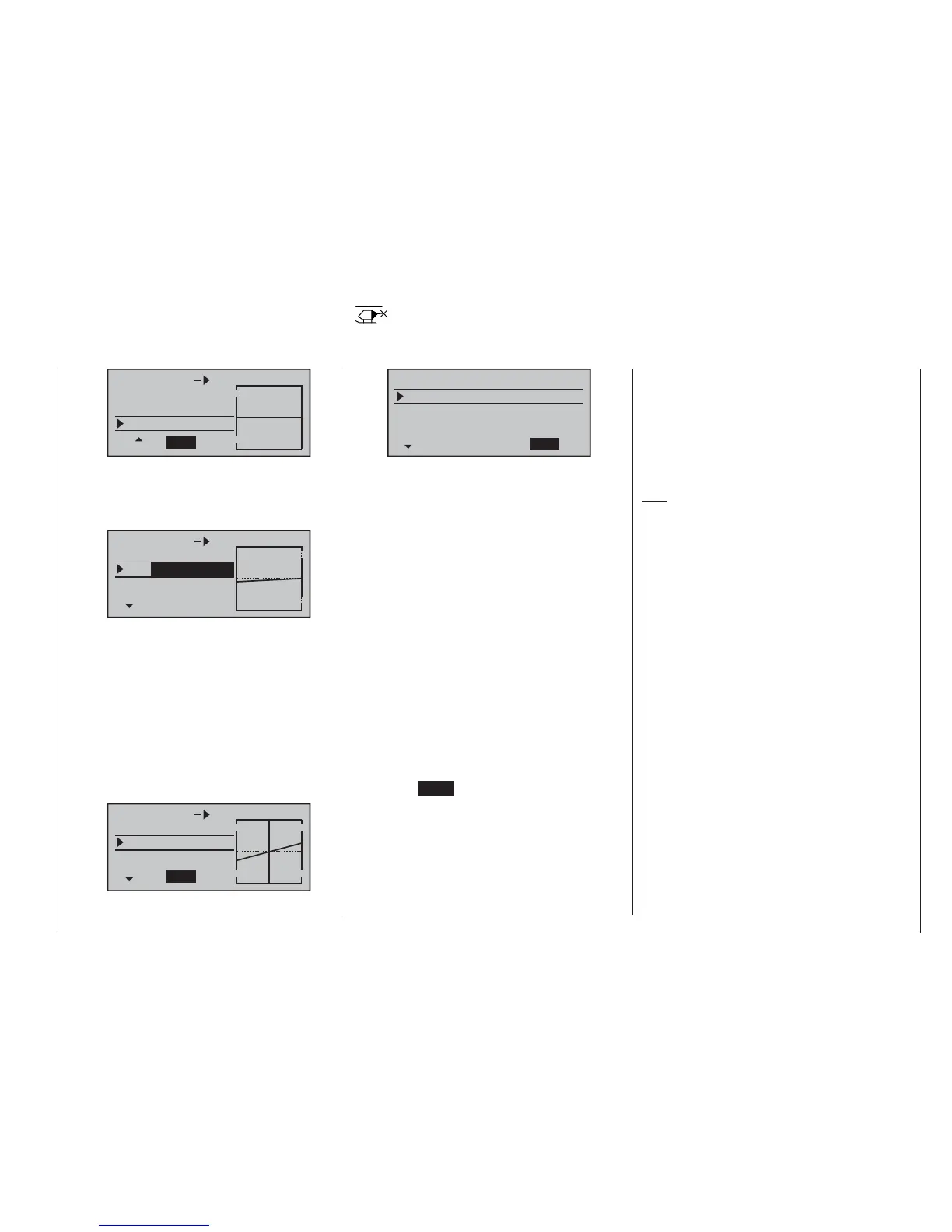
SP – MIXER
ptch
roll
nick
61%
+
61%
+
61%
+
In the “Swashplate” line of the »base sett.« men
u you
have already defi ned the number of servos which are in-
stalled in your helicopter to provide collective pitch con-
trol; see page 50. With this information the mx-16iFS
program automatically superimposes the functions for
roll, pitch-axis and collective pitch as required, i. e. you
do not need to defi ne any additional mixers yourself.
If you have a model helicopter which only has a single
collective pitch servo, the “Swashplate mixer” menu
point is – of course – superfl uous, since the three
swashplate servos for collective pitch, pitch-axis and
roll are controlled independently of each other. In this
case the swashplate mixer menu does not appear in
the multi-function list. With all other swashplate linkages
employing 2 … 4 collective pitch servos, the mixer ratios
and directions are set up by default, as can be seen in
the screen shot above. The pre-set value is +61% in
each case, but the value can be varied within the range
-100% to +100% using the rotary cylinder, after fi rst
pressing the rotary cylinder.
Pressing the CLEAR button resets the mixer input in the
highlighted fi
eld to the default value of +61%.
If the swashplate control system (collective pitch, roll
and pitch-axis) does not follow the transmitter sticks in
the proper manner, then the fi rst step is to change the
mixer directions (+ or -), before you attempt to correct
the directions of servo rotation.
HEIM mechanics with two collective pitch servos:
Swashplate mixers
Collective pitch, roll and pitch-axis mixers
The • collective pitch mixer acts on the two collective
pitch servos connected to receiver sockets 1 + 2;
the • roll mixer also acts on the two collective pitch
servos, but the direction of rotation of one servo is
reversed, and
the • pitch-axis mixer acts on the pitch-axis servo
alone.
Note:
Ensure that the servos do not strike their mechanical
end-stops if you change the servo mixer values.
MIX 3 S
+
0%
+
0%
100%
CLRSTO
+
el
trv
offs
Now hold the rotary cylinder pressed in again to
mo
ve to the “Travel” line, where you set the required
mixer input – after moving the selected switch to the
mixer ON position.
MIX 3
S
100%
ASYSYM
+
10%
+
10%
+
el
trv
offs
The following example applies to model helicopters:2.
In the Helicopter program you may wish to assign
one of the two INC / DEC buttons (CTRL 5 or 6) to
the collective pitch trim function. This is the proce-
dure: in the »contr set.« menu assign one of these
two transmitter controls to input “I8”. Now simply de-
fi ne a free mixer “8 ¼ 1” with a symmetrical mixer
ratio of, say, 25%. Due to the internal coupling, this
transmitter control now acts equally on all the collec-
tive pitch servos you are using, without affecting the
throttle servo.
MIX 1 8 1
+
25%
+
25%
0%
ASYSYM
trv
offs