256
ROBOTI FUNKTSIOONID
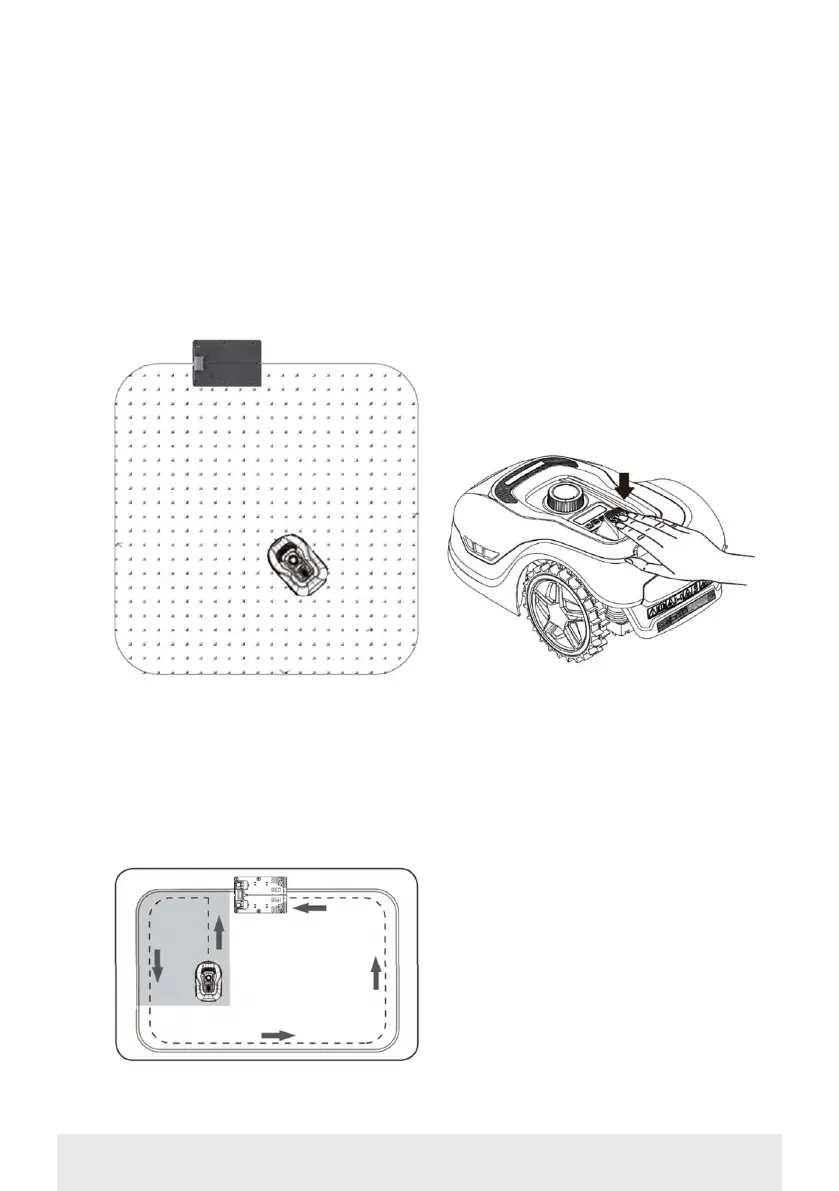
Robotmuruniiduki põhilised
tööpõhimõtted
Robotmuruniiduk valib sõidumustri
juhuslikult. See tähendab, et ta ei järgi
mingit kindlat mustrit, vaid liigub
lihtsalt juhuslikult aias ringi. Selle eelis
on see, et ühe nädala jooksul niites
kaetakse piirdetraadi ulatuses kogu
muruplats.
Sõitmine laadimisjaama
Kui aku tühjeneb, otsib
robotmuruniiduk lähima piirdetraadi
ja sõidab seejärel automaatselt (ilma
niitmata) vastupäeva suunas , tagasi
laadimisjaama. Siin laetakse see
täielikult üles ja seejärel jätkatakse
lõikamistsüklit.
Piirdetraadi tuvastamine
Kui robotmuruniiduk läheneb
piirdetraadile, tuvastavad seda katte
esiosasse paigaldatud andurid.
Parima lõikamistulemuse tagamiseks
jookseb robot siiski umbes 10-12 cm
piirdetraadist kaugemale ette (siin ei
tohi lõigata).
Seda on oluline meeles pidada
piirdetraadi traat aeda.
Roboti peatamine
Kui soovite robotmuruniidukit niitmise
või laadimisjaama tagasipöördumise
ajal peatada, tuleb aktiveerida/ vajutada
punast STOP-nuppu.
Lõikekõrguse reguleerimine
Robotmuruniiduki lõikekõrgust saab
reguleerida vahemikus 20-60 mm.
Kui rohi on roboti paigaldamisel
kõrgem kui 60 mm, tuleb muru niita
esmalt tavalise niidukiga. Vastasel
juhul on roboti terade koormus liiga
suur, mille tulemuseks on väga halvad
lõikamistulemused ja masin jääb
kergesti kinni.
Soovitatav on alustada lõikekõrguse
seadistamisega maksimumilt (60 mm)
ja vähendada lõikekõrgust järk-järgult
mõne päeva jooksul, kuni saavutate
soovitud muru kõrguse.
Lõikekõrgus määratakse STOP-nupu
vajutamisega (kui robot töötab). Kui
robot on paigal, saab lõikekõrgust
 Loading...
Loading...



