4. Servo using method and gain adjustment
4-17
4.4 Autotuning
For the autotuning applied to FDA7000 series, the servo drive estimates the inertia of the load
attached to the servo motor during operation and has the function of adjusting the speed control
gain and position control gain.
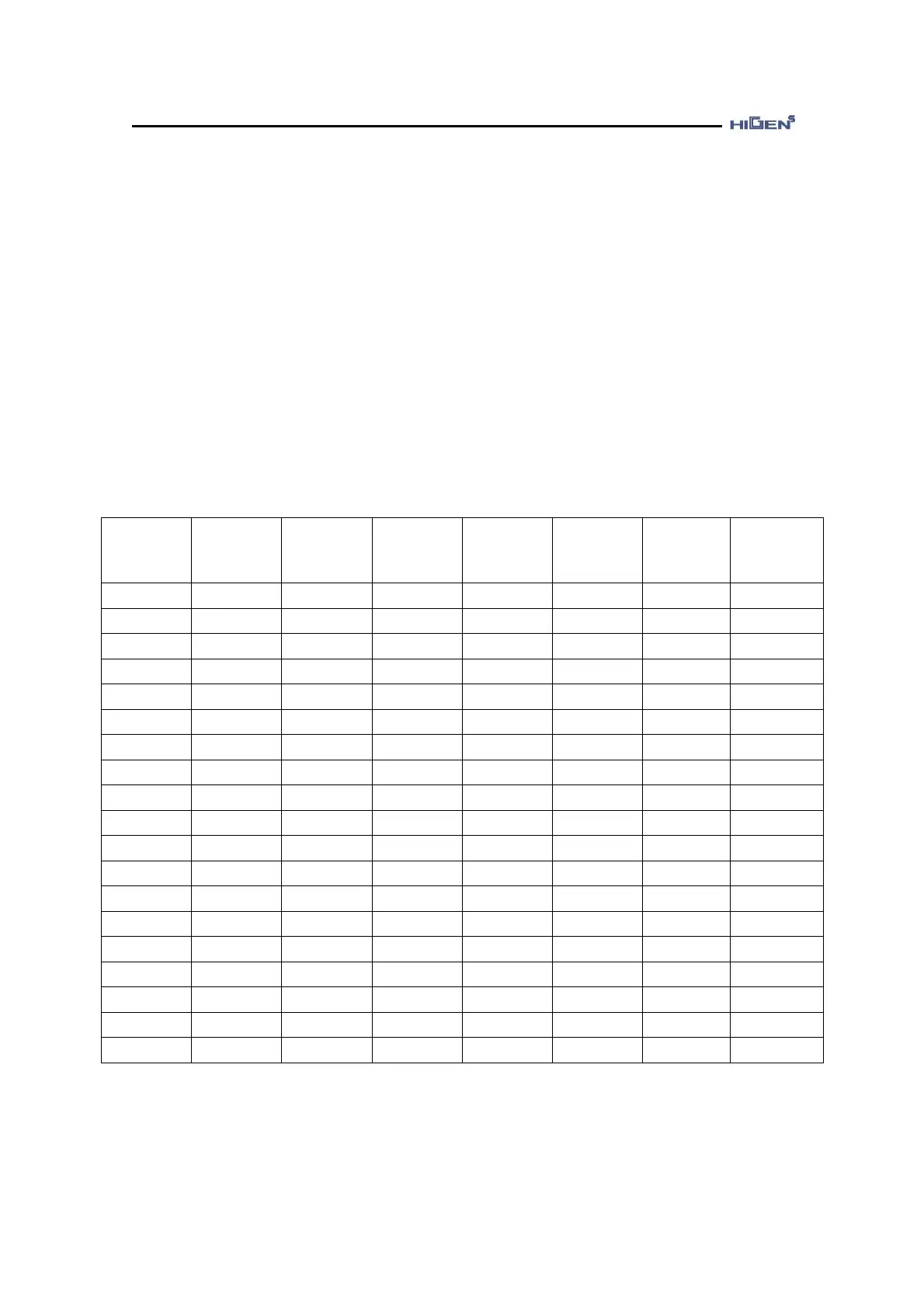
4.4.1 System response setting
The system response is set (P02-18) manually before using autotuning. The following P05-05,
P05-06, P03-05, P03-06, P03-07, P03-08 and P02-16 automatically changes and when the
autotuning function is set to “ON”, the tuning operation is executed with the target of manually
set value.
P02-18
(System
response
setting)
P05-05
(Position
loop gain 1)
P05-06
(Position
loop gain 2)
P03-05
(Speed
control loop
gain 1)
P03-06
(SC TC 1)
P03-07
(Speed
control loop
gain 2)
P03-08
(SC TC 2)
P02-16
(Command
torque filter
TC)
1 2.0 5.0 2.0 200.0 5.0 120.0 4.5
2 5.0 10.0 5.0 120.0 10.0 80.0 3.5
3 10.0 15.0 10.0 80.0 15.0 60.0 3.0
4 15.0 20.0 15.0 60.0 20.0 45.0 2.5
5 20.0 25.0 20.0 45.0 25.0 40.0 2.0
6 25.0 30.0 25.0 40.0 30.0 30.0 1.5
7 30.0 35.0 30.0 30.0 35.0 25.0 1.3
8 35.0 45.0 35.0 25.0 45.0 18.0 1.2
9 45.0 55.0 45.0 18.0 55.0 17.0 0.9
10 55.0 70.0 55.0 17.0 70.0 13.0 0.8
11 70.0 85.0 70.0 13.0 85.0 11.0 0.6
12 85.0 105.0 85.0 11.0 105.0 10.0 0.5
13 105.0 130.0 105.0 10.0 130.0 8.0 0.4
14 130.0 160.0 130.0 8.0 160.0 6.0 0.25
15 160.0 200.0 160.0 6.0 200.0 5.4 0.2
16 200.0 240.0 200.0 5.4 240.0 5.0 0.15
17 240.0 300.0 240.0 5.0 300.0 3.5 0.1
18 300.0 350.0 300.0 3.5 350.0 3.2 0.0
19 350.0 360.0 350.0 3.2 360.0 3.1 0.0
◆ If you set the system response to high, it increases the servo system gain to increase the
response. But if the set value is too high, it can cause noise and vibration in the motor. In this
case, appropriately lower the set value.