3. Parameter setting
3-8
P01-18*
Serial ID
Unit
-
Display range
1 ~ 31
Manufactured
default
1
Speed/Torque/
Position control
P01-19
Parameter Lock
Unit
-
Display range
ON/OFF
Manufactured
default
OFF
Speed/Torque/
Position control
P01-20*
Absolute Origin
Unit
-
Display range
ON/OFF
Manufactured
default
OFF
Speed/Torque/
Position control
* When applying the 2048 or 17 bit absolute encoder, you can execute the encoder
origin point. If you enter “ON” for the parameter, it will change to “OFF” and reset the
Multi-turn data.
3.3 General control parameter setting
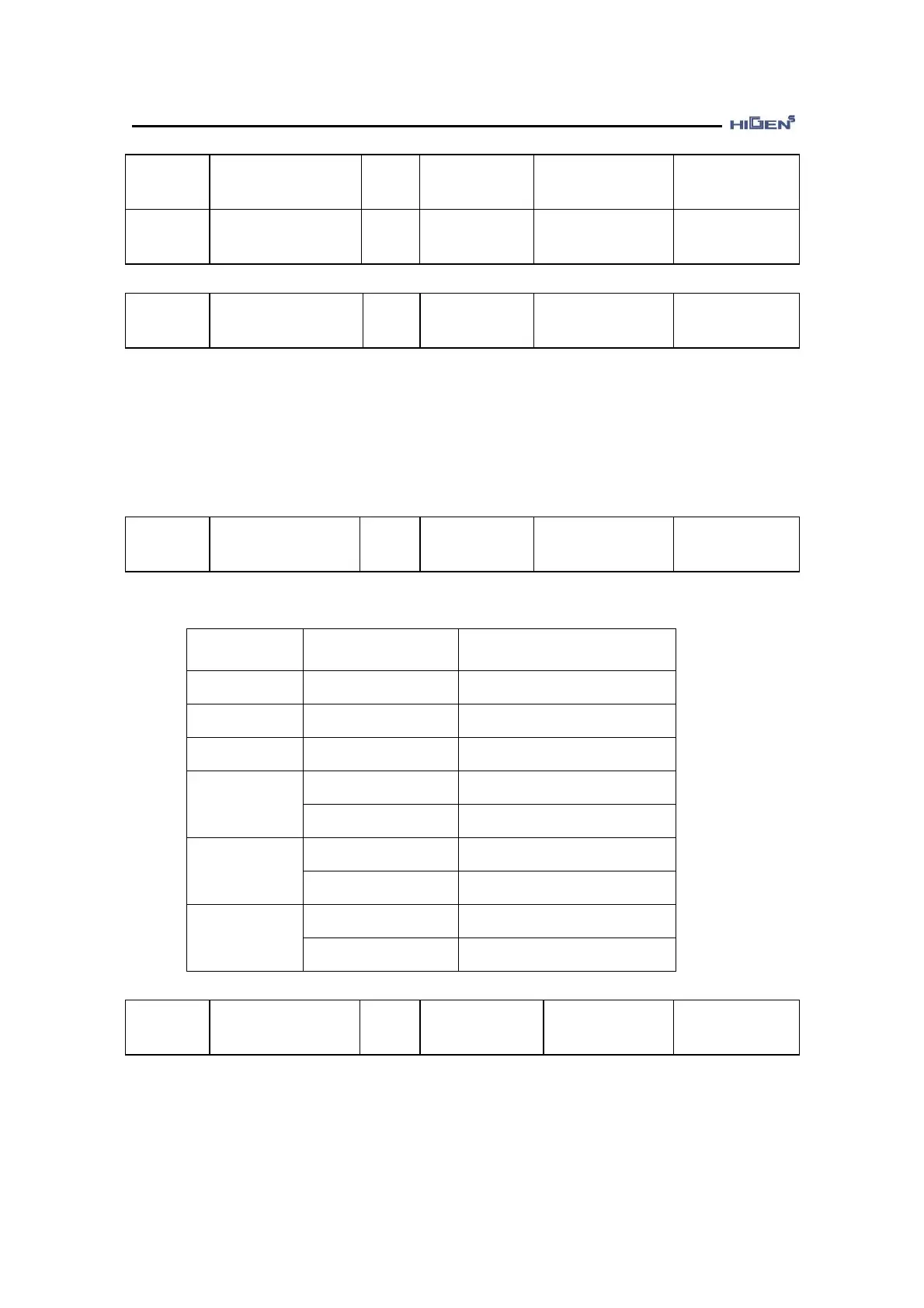
P02-01*
Control Mode
Unit
-
Display range
0 ~ 5
Manufactured
default
1
Speed/Torque/
Position control
The conversion of control mode cannot be changed when SERVO ON states.
Set value
Type contact point
condition
Applied control mode
0 -
Torque control mode
1 -
Speed control mode
2 -
Position control mode
ON
Speed control mode
3
OFF
Torque control mode
ON
Speed control mode
4
OFF
Position control mode
ON
Position control mode
5
OFF
Torque control mode
P02-02
Mode Change Time
Unit
ms
Display range
100.0 ~ 10000.0
Manufactured
default
500.0
Speed/Torque/
Position control
When the servo drive is set to multiple control mode, decelerate the servo motor during the set
control mode conversion time for the conversion contact point input of the control mode to
convert to control mode when the speed is zero.