Chapter 6 Function Introduction Shenzhen Hpmont Technology Co., Ltd
―68― HD5L Series Controller User Manual
Code Name Description Range
factory setting
F06.13 Reserved
No weighing current coefficient
F06.15 No weighing speed-loop KP 1
9999
2000
No weighing speed-loop KI
F06.14-F06.16 are used to adjust the effect of no weighing auto-compensation (F06.00 = 4).
• The system’s response can be expedited through increasing F06.14-F0616, but system’s
oscillation and overshoot may occur if the value of F06.14-F0616 is too high.
• Generally, it can smoothly start elevator via adjusting F06.14 when debugging.
• Increase F06.14 so as to avoid sliding vehicle at starting moment. Decrease F06.17 so as to
avoid shake at starting moment.
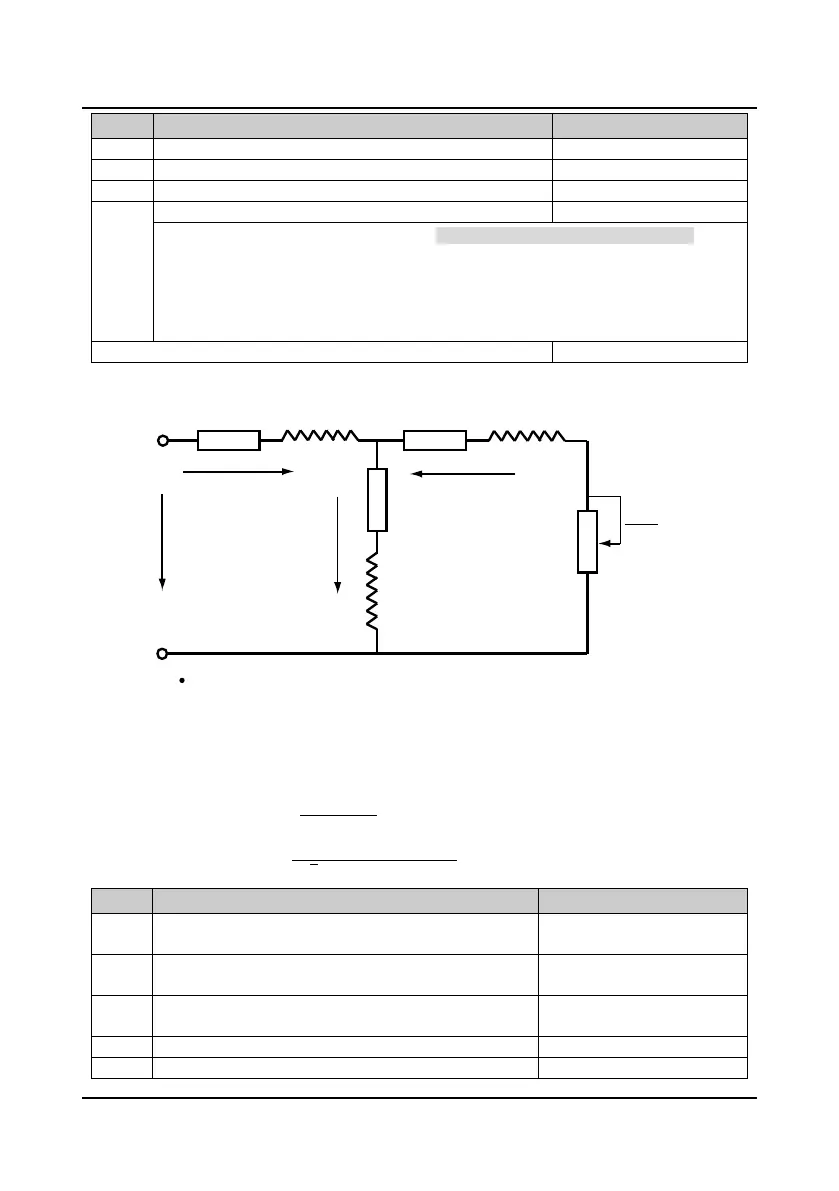
6.2.8 Group F07 Asynchronous Motor Parameters
The relationship among rated torque current, excitation current and motor’s rated current is as
follows:
Rated torque current = F07.05 × F07.02
Excitation current F07.11 =
�
1 − F07.05
2
× F07.02
Mutual inductance F07.10 =
F07.01
2
√
3
π × F07.03 × F07.11
− F07.09
Code Name Description Range
factory setting
F07.00 Asynchronous motor rated power 0.2
400.0kW
【Depend on controller model】
F07.01 Asynchronous motor rated voltage 0V
Controller rated voltage
Depend on controller model
F07.02 Asynchronous motor rated current 0.0
999.9A
【Depend on controller model】
F07.03 Asynchronous motor rated frequency 1.00
100.00
50.00Hz
Asynchronous motor rated Rpm
I1
I2
Io
R1 R2Ll Ll
L
m
U1
R2
1 - S
S
R1 = F07.07 (Stator resistance) Ll = F07.09 (Leakage inductance)
R2 = F07.08 (Rotor resistance) Lm = F07.10 (Mutual inductance)
Io = F07.11 (Excitation current) S = Slip ratio
 Loading...
Loading...