Chapter 6 Function Introduction Shenzhen Hpmont Technology Co., Ltd
―70― HD5L Series Controller User Manual
Code Name Description Range
factory setting
F07.15 Asynchronous motor torque boost 0.1
30.0
0.1%
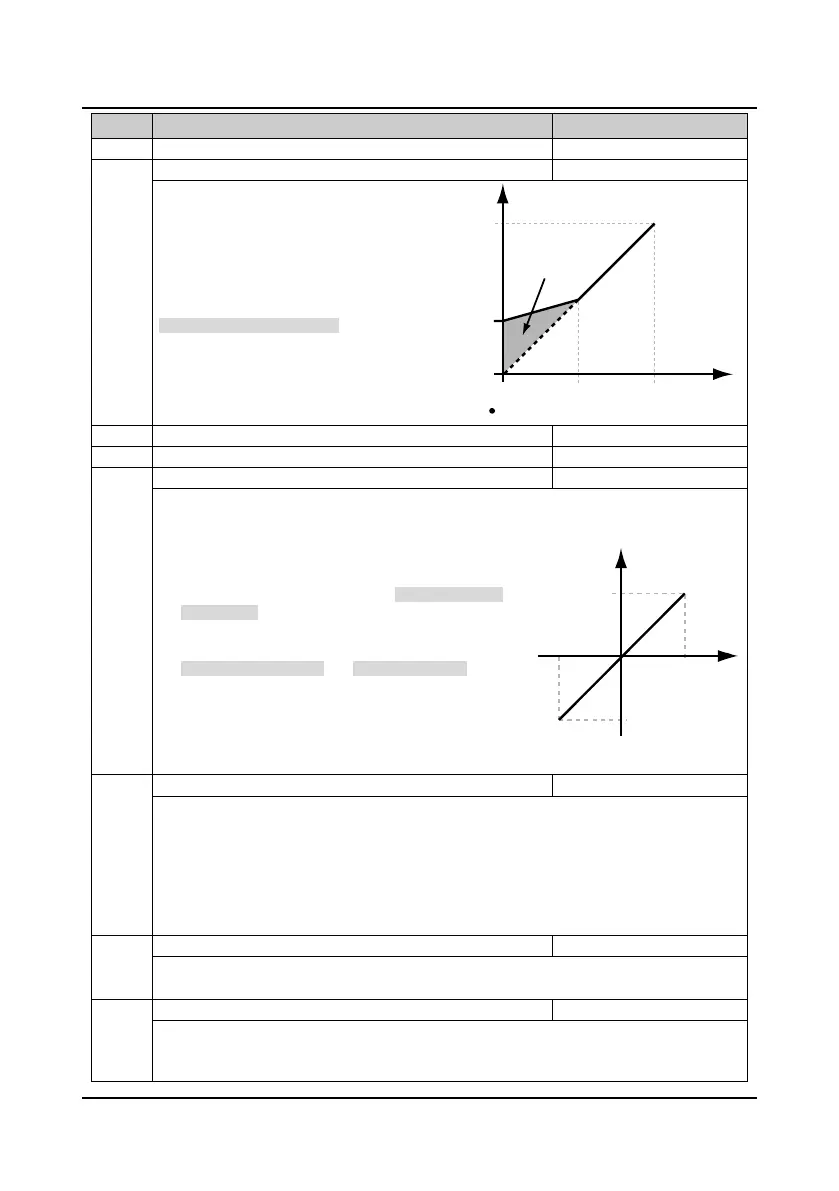
Asynchronous motor torque boost end-point
In order to compensate the torque
drop at low frequency, the controller
can boost the voltage so as to boost
the torque.
F07.16 is relative to percentage of
motor rated frequency (F07.03).
F07.17 Asynchronous motor of slip compensation gain 0.0
300.0
100.0%
Asynchronous motor of slip compensation filter time
F07.19 Asynchronous motor of slip compensation limitation 0.0
250.0
200.0%
The motor’s slip changes with the load torque, which results in the variance of motor speed. Through
slip compensation (the controller will auto adjust its output frequency according to the motor load
torque) to reduce the influence.
• In driving state (the actual speed is lower than the
setting speed) and in generating state (the actual speed
is higher than the setting speed), the slip compensation
gain (F07.17) should be increased gradually.
• The value of auto slip compensation depends on the
motor’s rated slip, consequently make sure the motor’s
rated frequency (F07.03) and rated Rpm (F07.04) are
set correctly.
Range of slip compensation = Slip compensation limit
(F07.19) × Rated slip.
Rated slip = F07.03 - F07.04 × Np / 60.
• Np is the number of motor pole pairs.
F07.20 AVR function 0
2
1
0: No action.
1: Action all the time.
2: No action in deceleration process.
• The output voltage can be regulated to maintain constant via AVR. Thus, normally the AVR
function should be enabled, especially when the input voltage is higher than the rated voltage.
• In deceleration process, if the F07.20 = 0 or F07.20 = 2, the running current will be a little higher;
while if the F07.20 =1, the motor will decelerate steadily and the current will be smaller.
F07.21 Asynchronous motor of oscillation-suppression mode 0,1
0
0: Oscillation suppression is dependent on the motor’s exciting current component.
1: Oscillation suppression is dependent on the motor’s torque current component.
F07.22 Asynchronous motor of oscillation-suppression coefficient 0
200
100
This function is used to damp oscillation when output current is continually unstable.
This function helps to keep the motor running smoothly through correctly adjusting the setting of
F07.22.
F07.16max F07.03
Voltage of manual
torque boost
F07.01
Frequency
Voltage
0
Boosted value
F07.16max = 50% F07.03
Load
Slip
Negative slip
100%
-100%
compensation
Positive slip
compensation
 Loading...
Loading...