iDrive2 inverters Function Parameters
32
Detailed instruction of parameters
protection will be adjusted properly. The low speed
compensation characteristic mentioned here means
reducing the threshold of the overload protection of the
motor whose running frequency is below 30Hz.
2: Frequency conversion motor (without low speed
compensation) Because the heat-releasing effect of the
specific motors won’t be impacted by the rotation speed,
it is not necessary to adjust the protection value during
low-speed running.
Motor
overload
protection
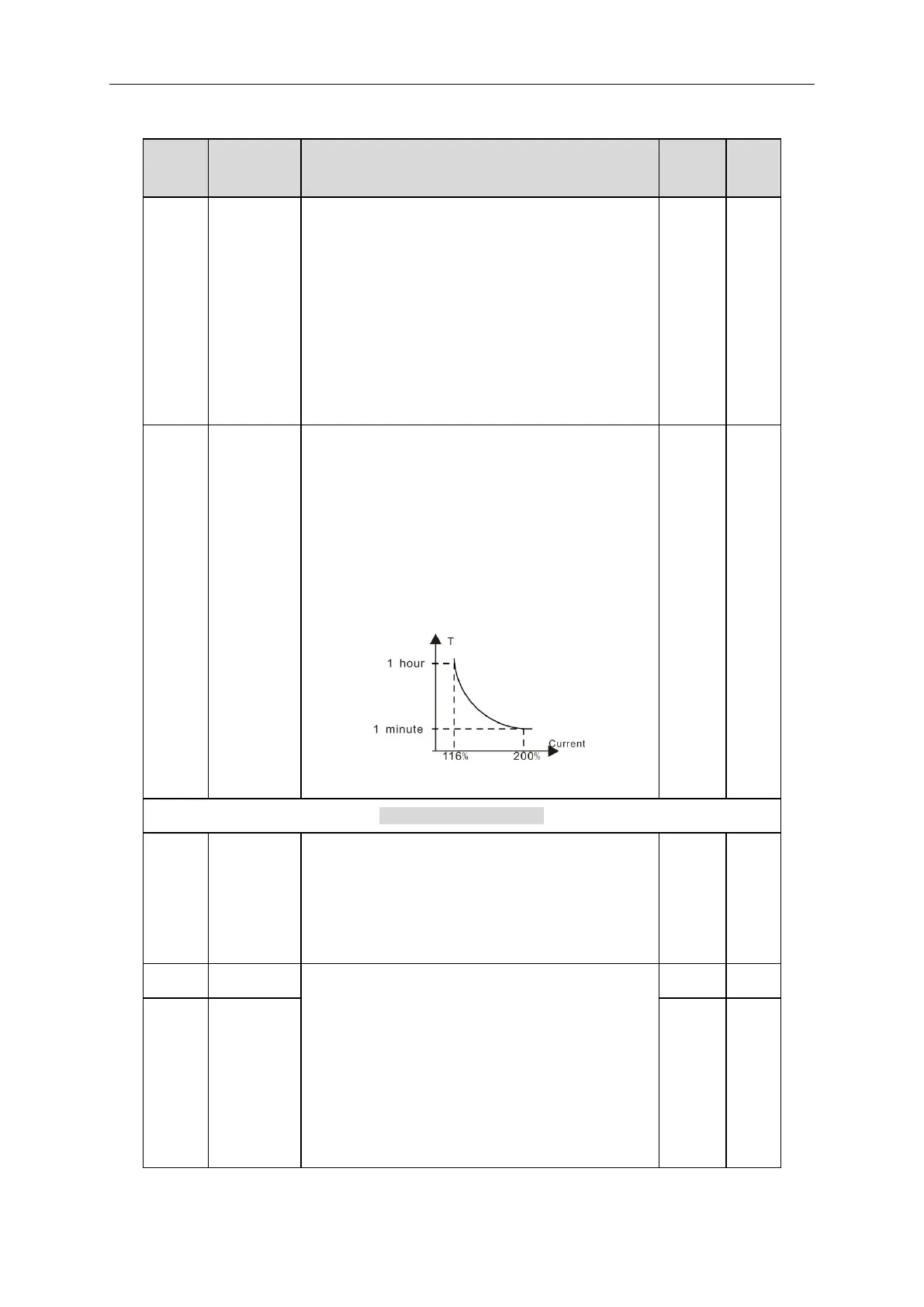
When P02.27=overload protection current of the
motor/rated current of the motor
So, the bigger the overload coefficient is, the shorter the
reporting time of the overload fault is. When the overload
coefficient <110%, there is no overload protection. When
the overload coefficient =116%, the fault will be reported
after 1 hour, when the overload coefficient=200%, the
fault will be reported after 1 minute.
Setting range: 20.0%~120.0%
DefineS the V/F curve of IMO XKL motor to meet the
need of different loads.
0:Straight line V/F curve;applying to the constant torque
load
1:Multi-dots V/F curve
Torque boost to the output voltage for the features of low
frequency torque. P04.01 is for the Max. Output voltage
V
b
.
P04.02 defines the percentage of closing frequency of
manual torque to f
b
.
Torque boost should be selected according to the load.
The larger the load is, the higher the torque is. Too high
torque boost will create excessive magnetizing current,