Chapter3Operation,DisplayandTrialRunning
18
Auto-tuning
Mode
Pr. Setting Application
No operation F1-16 = 0
After motor auto-tuning is completed, the value of F1-16 is
restored to 0 automatically.
Static
auto-tuning 1
F1-16 = 1
This mode is used when the back EMF of the motor is known.
The motor runs at a low speed during auto-tuning, and
therefore, the overflow valve need not be opened.
Dynamic
auto-tuning
F1-16 = 2
This mode is used when the back EMF of the motor is
unknown.
The motor runs at a high speed during auto-tuning, and
therefore, the overflow valve must be opened. With-load
auto-tuning reduces the accuracy of motor auto-tuning,
affecting the system control performance.
Static
auto-tuning 2
F1-16 = 3
This mode is used when the back EMF of the motor is known
and there is heavy load.
The motor runs at a low speed during auto-tuning, and
therefore, the overflow valve need not be opened.
When wiring of the encoder and motor is correct but Err43 is
reported, use this mode. Otherwise, the resolver feedback
signal is wrong. In this case, check the encoder signal wiring
and installation accuracy.
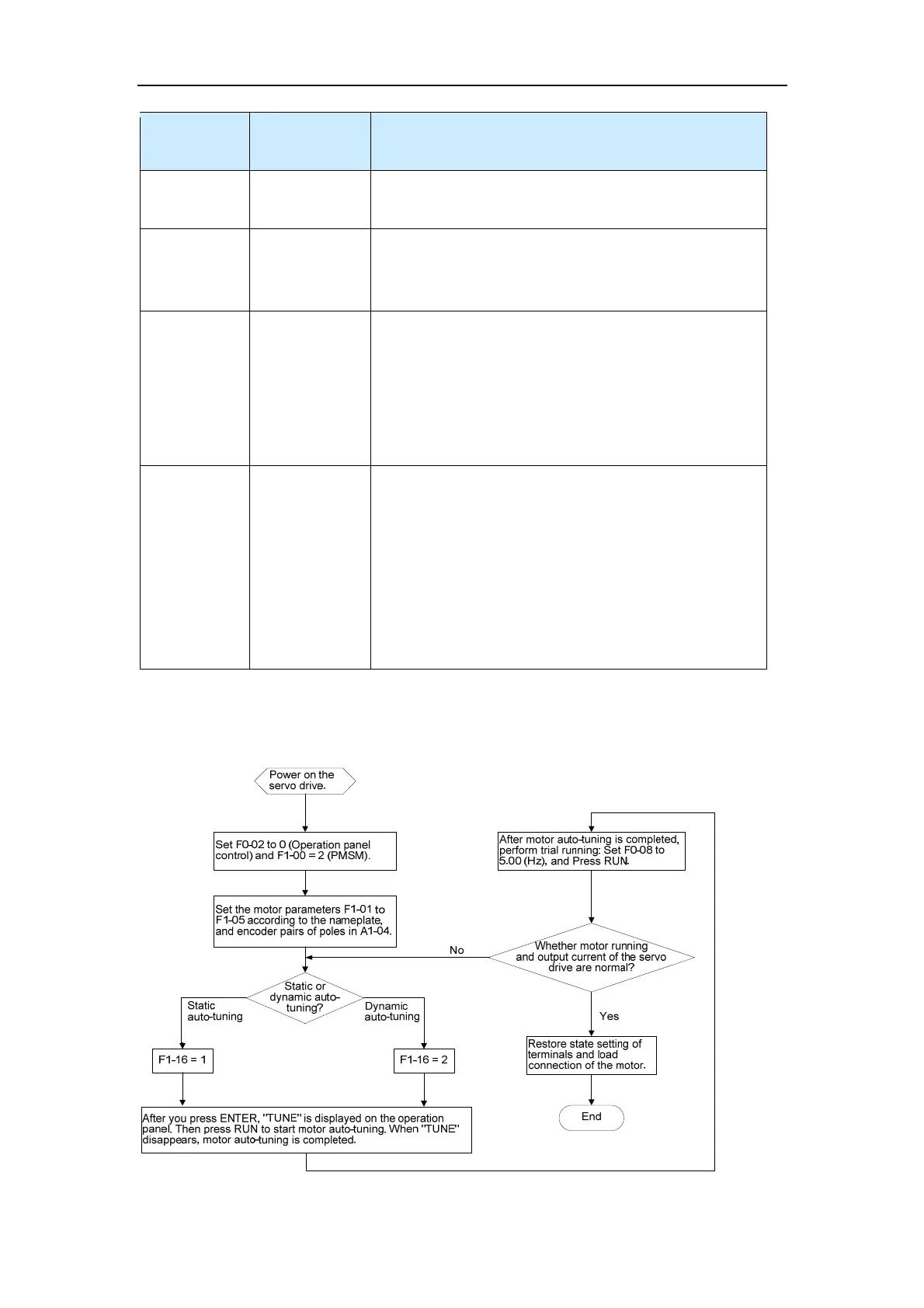
Motor Auto-tuning Procedure
Figure 4-11 Motor auto-tuning procedure
 Loading...
Loading...

