Chapter5Troubleshooting
26
Chapter 5 Troubleshooting
The mixture of the hydraulic circuit of the IMM and the electrical system is very
complicated. Providing the only digital operation panel, the servo drive may reflect faults
of all peripheral devices. These faults may seem to be caused by the servo drive, but may
be actually caused by other reasons. The following part classifies faults into several types,
and describes the fault principles and corresponding solutions from the most common
ones to less common ones. When a fault occurs, you can first determine the fault type,
analyze the causes, and perform troubleshooting according to the instructions.
5.1 Troubleshooting of Common Faults with Alarm
Fault Code
ERR02, ERR03, ERR04
Fault Principle
Overcurrent during running
After the fault occurs, view the value of F9-22. If the value is 2.5 times of the rated current, it indicates
that overcurrent occurs on the servo drive.
Fault Cause Solution
Motor commissioning
fault
Refer to section 3.4.3 “Setting and Auto-tuning of Motor Parameters”.
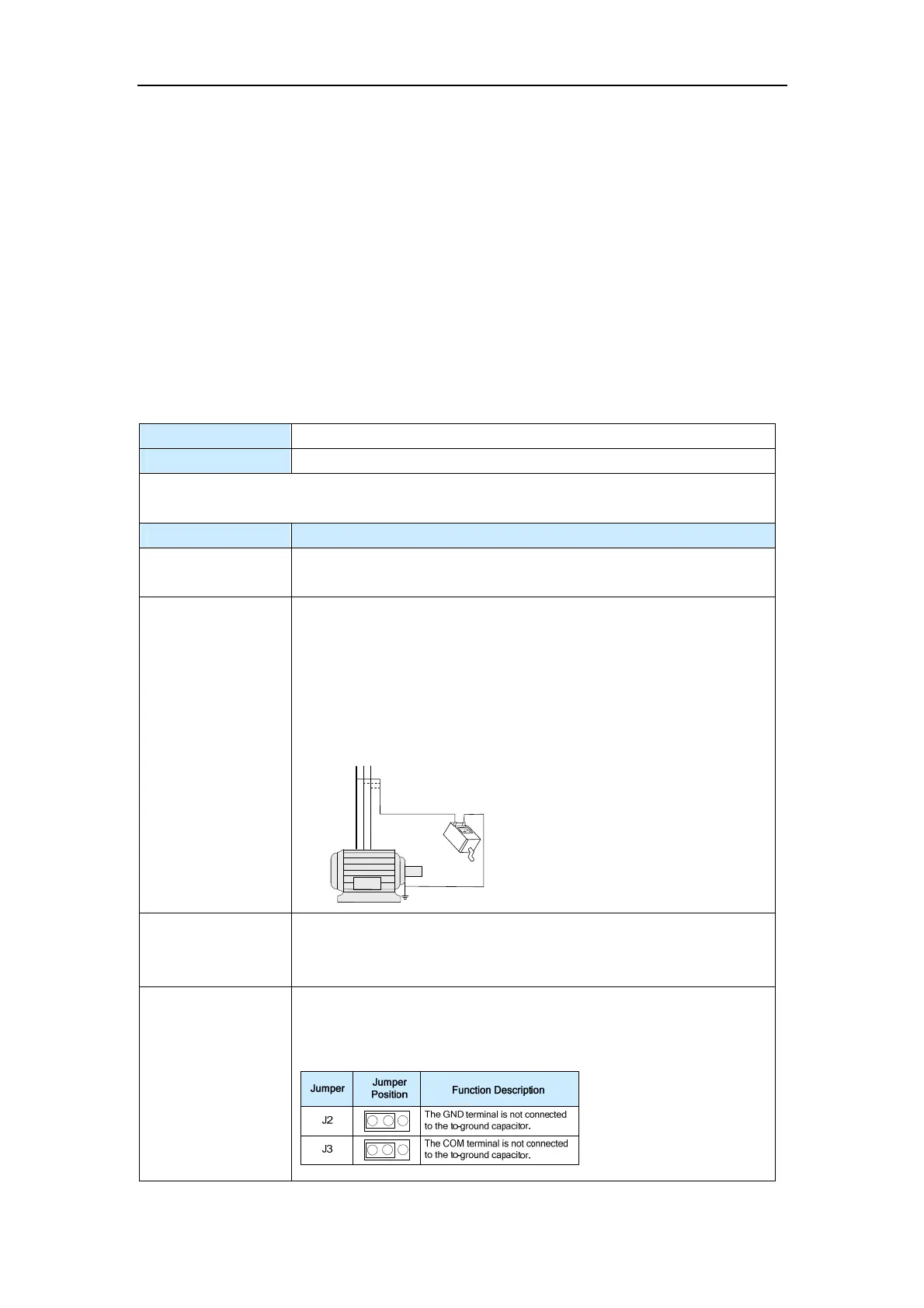
Motor short-circuit to
ground
Disconnect the cables from the motor, and measure the to-ground (housing
of the motor) resistance of U, V, W phases by using the M mode in the ohm
function of the multimeter. On normal conditions, the motor to-ground
resistance is above 5 M. If the measured value is smaller than the value, it
indicates that the motor is short-circuited to ground. In this case, you need
to replace the motor.
UVW
Megger
Input terminals
of the motor
Ground
Voltage unstable
Check whether the mains voltage drops greatly. If the voltage is lower than
85% of the rated voltage, overcurrent is likely to occur during running. When
the voltage is too low, stop the servo drive immediately and find the causes.
Servo drive not
grounded well
Check whether the grounding cable exists and whether he servo drive is
well grounded. If the servo drive is poorly grounded, adopt the wiring mode
below.
 Loading...
Loading...

