- 118 -
This parameter is used to set the functions of the multifunctional digital input
terminals. If the setup is oil pressure control mode (A3-00 setting values is
non-zero), the DI2 default is “48: PID select terminals 1”, the DI3 default is
“49: PID select Terminal 2”, DI5 the default is “50: CAN communication
enabled”.
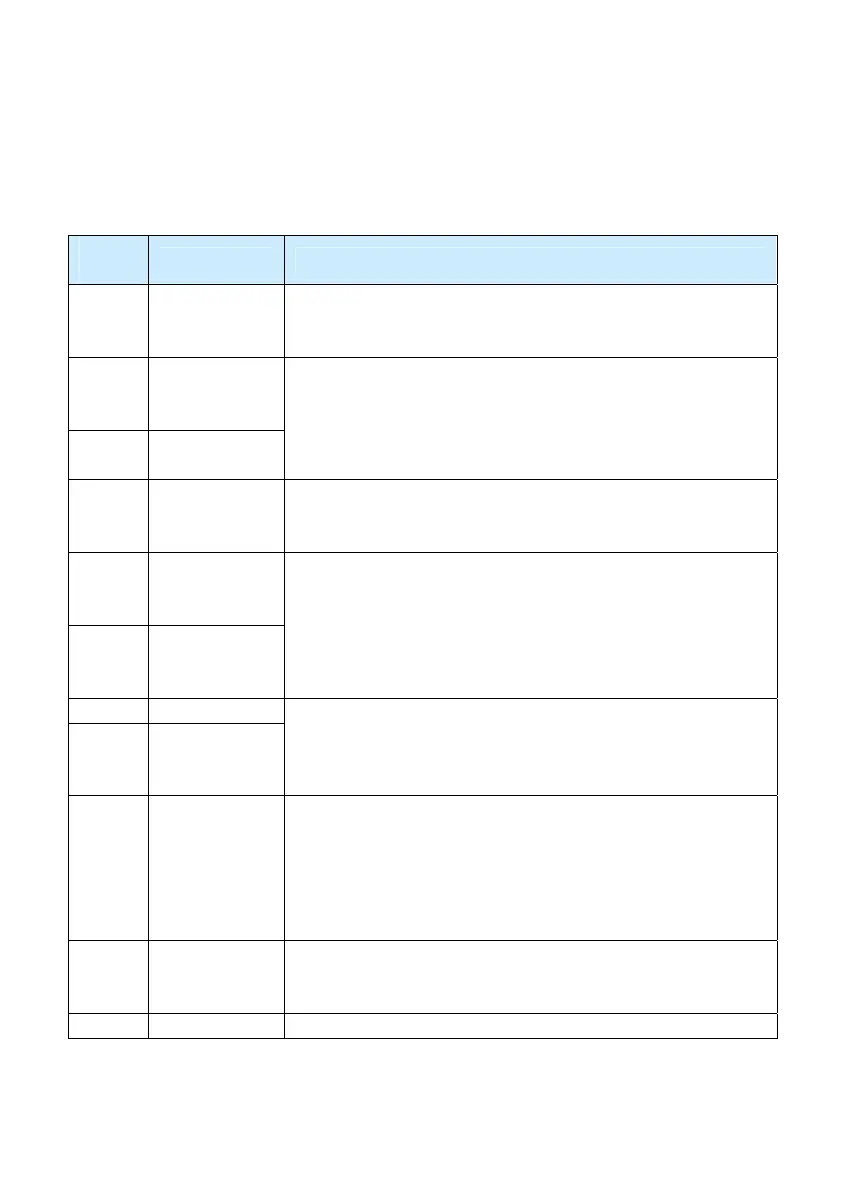
Setup
value
Function Description
0 No function
Even when there is signal input, the driver still has no
action. The no operation function can be set on the
unused terminals so as to prevent error action.
1
Forward
rotation
(FWD)
2
Reverse
rotation (REV)
Control the forward rotation and reverse rotation of the
driver via the external terminals.
3
Three-line
mode running
control
This terminal is used to confirm that the driver running
mode is three-line control modeFor detailed description,
please refer to F4-11 three-line control mode function code.
4
Forward
rotation Jog
(FJOG)
5
Reverse
rotation Jog
(RJOG)
FJOG refers to Jog forward rotation, while RJOG refers to
Jog reverse rotation. For details regarding frequency and
Jog acceleration/deceleration time during the Jog running,
refer to F8-00, F8-01 and F8-02 function codes.
6 Terminal UP
7
Terminal
DOWN
When the frequency is given by the external terminals, it is
used as increment and decrement commands of frequency
modification When the frequency source is set to digital
setup, it can be used to adjust the setup frequency.
8 Coast to stop
The driver locks the output, and the motor stop process is
beyond the driver control. It is the general method adopted
when there is huge load and no requirement for the stop
time.
This mode is the same as the meaning of coast to stop as
described in F6-10.
9
Fault reset
(RESET)
External fault reset function. It is the same as the function
of RESET key on the keyboard. Using this function can
realize long-distance fault reset.
10 Running The driver decelerates to stop, but all the running
 Loading...
Loading...

