ACT-N02E-1
6
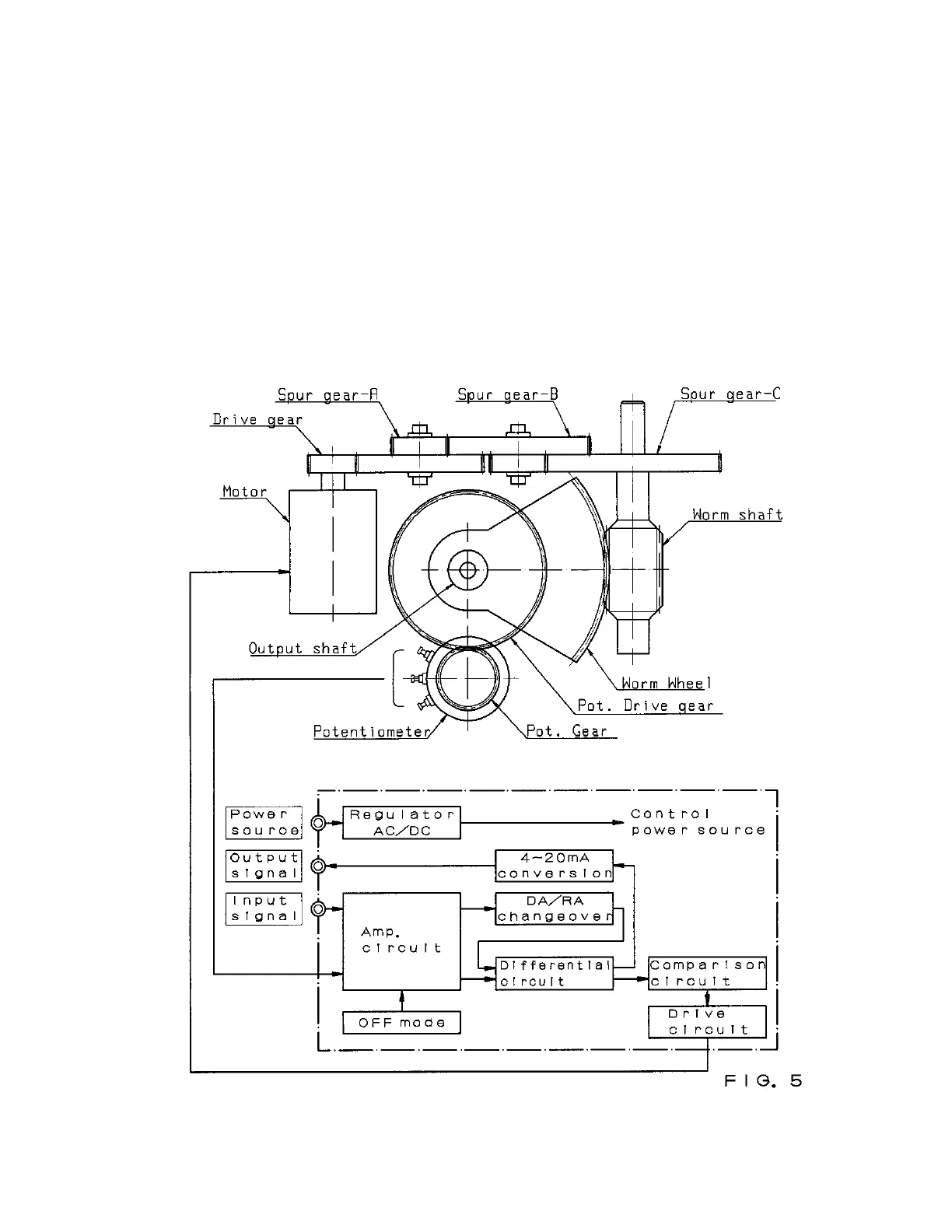
4. OPERATION PRINCIPLE
4-1 Operation principle
The system makes computation between input signals (4~20mA DC) and position signals, then turns the motor in
direction to balance them, and stops the motor when they are balanced.
The motor torque is transmitted through the worm structure to the actuator shaft.
Rotation direction (direct or reverse) is selectable at the setting switch.
The backlash revision type potentiometer detects and feedbacks the shaft position to the control pack.
The system always controls shaft position at the correlated rates with input signals.
< BLOCK DIAGRAM >

 Loading...
Loading...