1 Supplementary Operating Manual
22 of 48
AmaControl
2301.83/04-EN
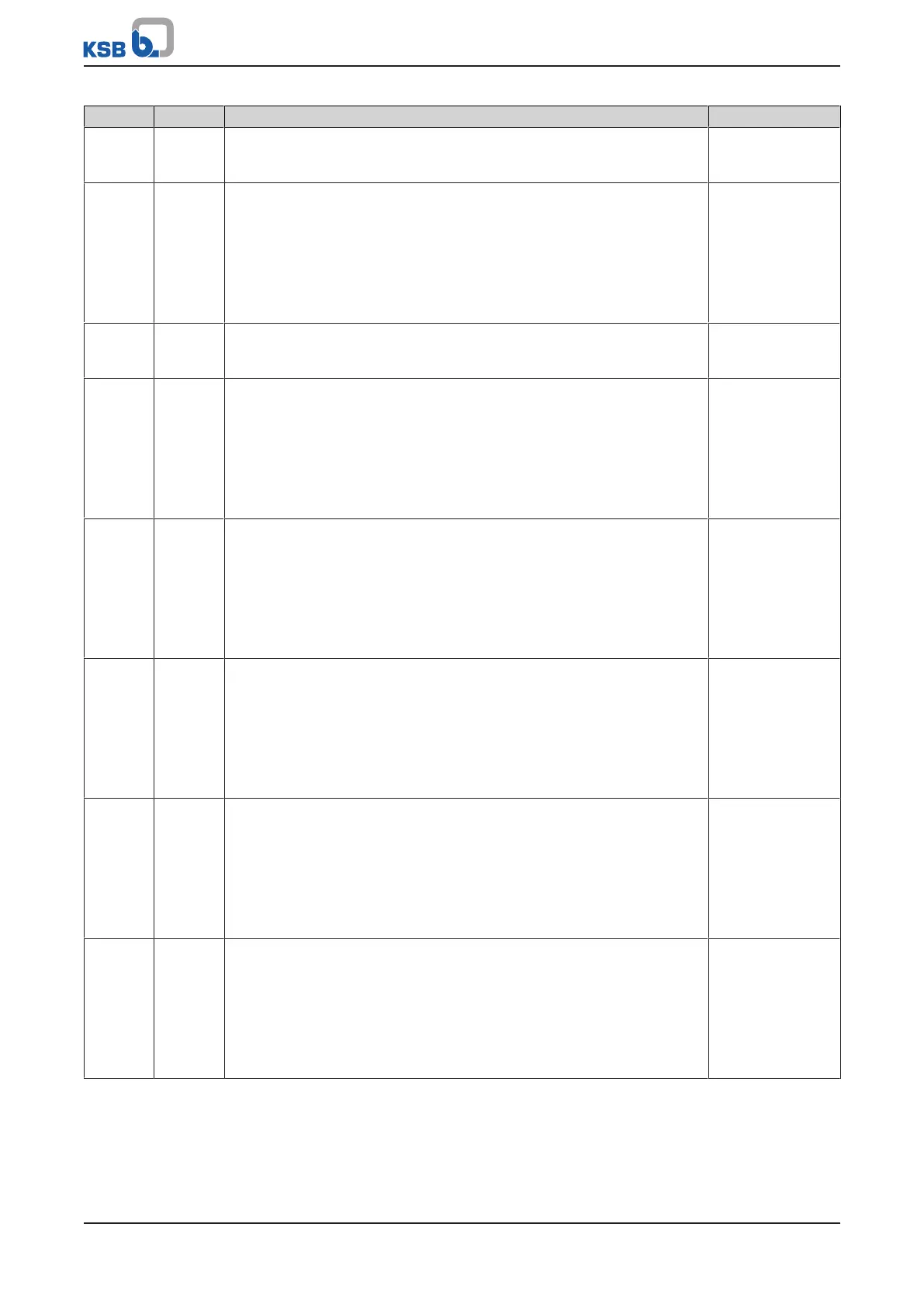
Start End Description Data type
8245 8245 Motor current actual value
Current = value * 10mA
0.01...655.35 A
u 16bit
8246 8246 Module condition, cos phi monitoring
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
8247 8247 Cosφ actual value
Cosφ = value / 100
-1.00...+1.00
u 16bit
8248 8248 Module condition, phase sequence
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
8249 8249 Module condition, frequency inverter monitoring
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
8250 8250 Module condition, phase failure
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
8251 8251 Module condition, phase asymmetry
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
8252 8252 Module condition, phase undervoltage
High byte: error number
Low byte: module condition, bit-coded
Bit 0 = active
Bit 1 = warning
Bit 2 = fault
Bit 3 = re-start delay
Bit 4 = interlocked
u 16bit
 Loading...
Loading...