58
8100_A Technical description
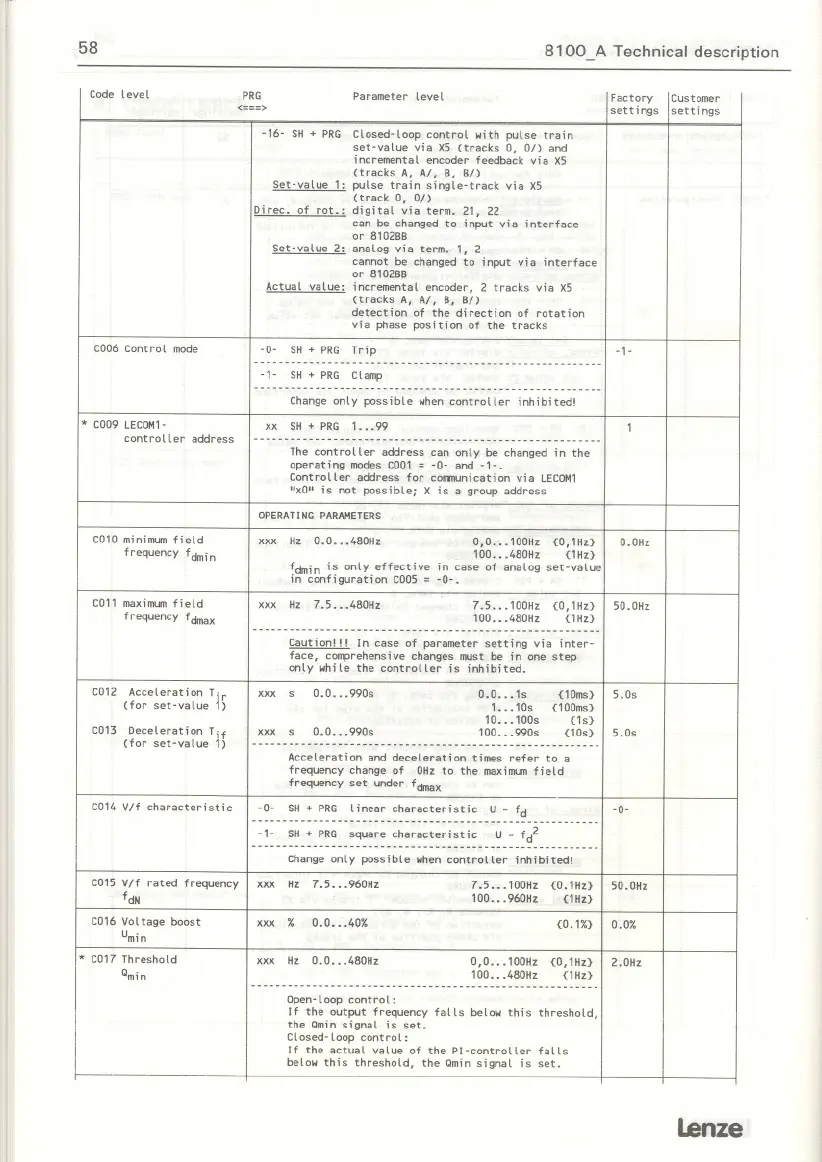
Code level PRG Parameter level Factory Customer
<===> settings settings
-16- SH + PRG Closed-loop cantral with pulse train
set-value via X5 (tracks 0, 01) and
incremental encoder feedback via XS
(tracks A, AI, B, BI)
Set-value 1: pulse train single-track via X5
(track 0, on
Oirec. of rot.: digital via term. 21, 22
can be changedto input via interface
or 810288
Set-value 2: analog via term. 1, 2
cannot be changedto input via interface
or 8102BB
ActuaL value: incremental encoder , 2 tracks via X5
(tracks A, AI, B, Bn
detection of the direction of rotation
via phase position of the tracks
C006 Control mode -0- SH + PRG Trip -1-
---------------------------------------------------------
.1- SH + PRG Clan.,
-------------.-.-.-.-------------------------------------
Change only possible when controller inhibited!
. C009LECOMI- xx SH+ PRG 1.. .99 1
controller address --- ------. ... - --- --.. ..- ---- --- -------- ...
Thecontroller address can only be changedin the
operating modes C001 = -0. and-1-.
Controller adckess for conrrunicationvia LECOM1
"xO" is not possible; X is a group adckess
OPERATINGPARAMETERS
C010 mini fjeld xxx Hz 0.0.. .480Hz 0,0.. .100Hz {O,IHz} O.OHz
frequency fchin 100.. .480Hz {1Hz}
fanin is only effective in case of analog set.value
in configuration COOS= .0-.
C011 maxi field xxx Hz 7.5...480Hz 7.5...100Hz {O,IHz} 50.0Hz
frequency fdnax 100. ..480Hz {1Hz}
-----------.......------.......-------...................-
Caution!!, In case of parameter setting via inter-
face, corrprehensive changes nust be in one step
only while the controller is inhibited.
C012 (~~~e~:~~~~~~eTi~ xxx s 0.0...990s O.~::::~s {~~=~ 5.0s
10...100s <ls}
C013 Oeceleration T"f xxx s 0.0...990s 100...99Os <lOs} 5.0s
(for set-value h ... u_ u u u uu _uu _u uu_
Acceleration and deceleration times refer to a
frequency change of OHzto the maxinunfield
frequency set under fdnax
C014VIf characteristic -0- SH+ PRGlinear characteristic U - fd -0-
--.----.........------.......----............------......
-1. SH + PRG square characteristic U - fd2
----------............---.....----.--.--..........---....
Change only possible when controller inhibited!
C015 Vif rated frequency xxx Hz 7.5...960Hz 7.5...100Hz {O.IHz} 50.0Hz
fdN 100.. .960Hz <1Hz)
C016 Voltage boost xxx % 0.0.. .40% {O.I%} 0.0%
Umin
.C017 Threshold xxx Hz 0.0. ..480Hz 0,0. ..100Hz {O,IHz} 2.0Hz
Qmin 100.. .480Hz <1Hz}
-----------........------......----------.......------...
Open-loop control:
If the output frequencyfaLLs below this threshold,
the Qminsignal is set.
Closed.loop control:
If the Bctual value of the PI.controller falls
beloN this threshold, the Qmin signal is set.
lenze