Chapter 6 Usage of Various Functions
6-16
(10) Bias
The Bias data is used for the compensation of offset in the proportional control. The
range of input is 0 ~ 4000 or D area.
Be cautious that The actual range of Bias is –2000 ~ 2000. namely, 0~2000
represents 0 ~ +2000 and 2001 ~ 4000 represents -1 ~ -2000.
Example> If offset(SV-PV) is 100 → Bias should be 100.
If offset(SV-PV) is -100 → Bias should be 2100.
(11) SV (Setting Value), PV(Present Value)
SV (setting value : the designated value) and PV (process value : present value) of
PID operation have the range 0 ~ 4000. The range can be set with the value of
data register. (Present value only can be set by data register.) Setting value means
the designated value to control and present value means the current value of
controlled device from sensor.
(12) PID algorithm
In PLC option card for iS7 inverter, two types of PID algorithm are available. The
velocity form(Speed) and positioning form.
Velocity form(Speed) operates incremental manners. Namely, it calculates the
change(∆n) required from previous manipulate value(MVn-1), but positioning form
calculates an absolute manipulate value(MVn) every sampling steps. Generally,
The velocity form is suited for the system in which load change is slow like
temperature control system, and positioning form is useful for system which’s load
change is fast
.
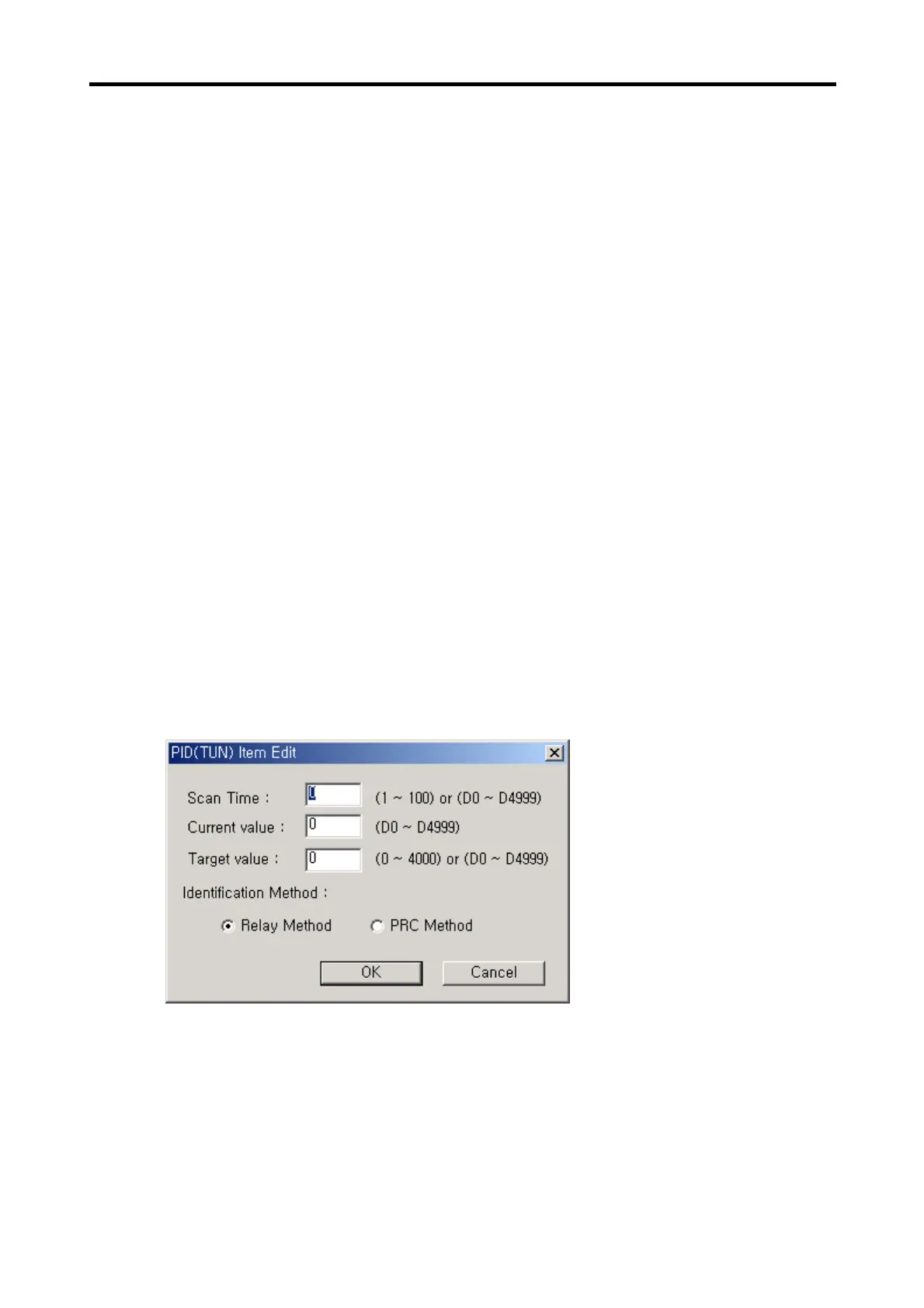
(b) PID8AT instruction parameter setting and explanation.
(1) Scan time
S_TIME is the period of reading data (sampling), and 10 times scaled up for more
precious operation. The range of sampling time is 0.1 ~ 10 seconds, and actual input
range is 0 ~ 100.
 Loading...
Loading...