6. NORMAL GAIN ADJUSTMENT
6 - 23
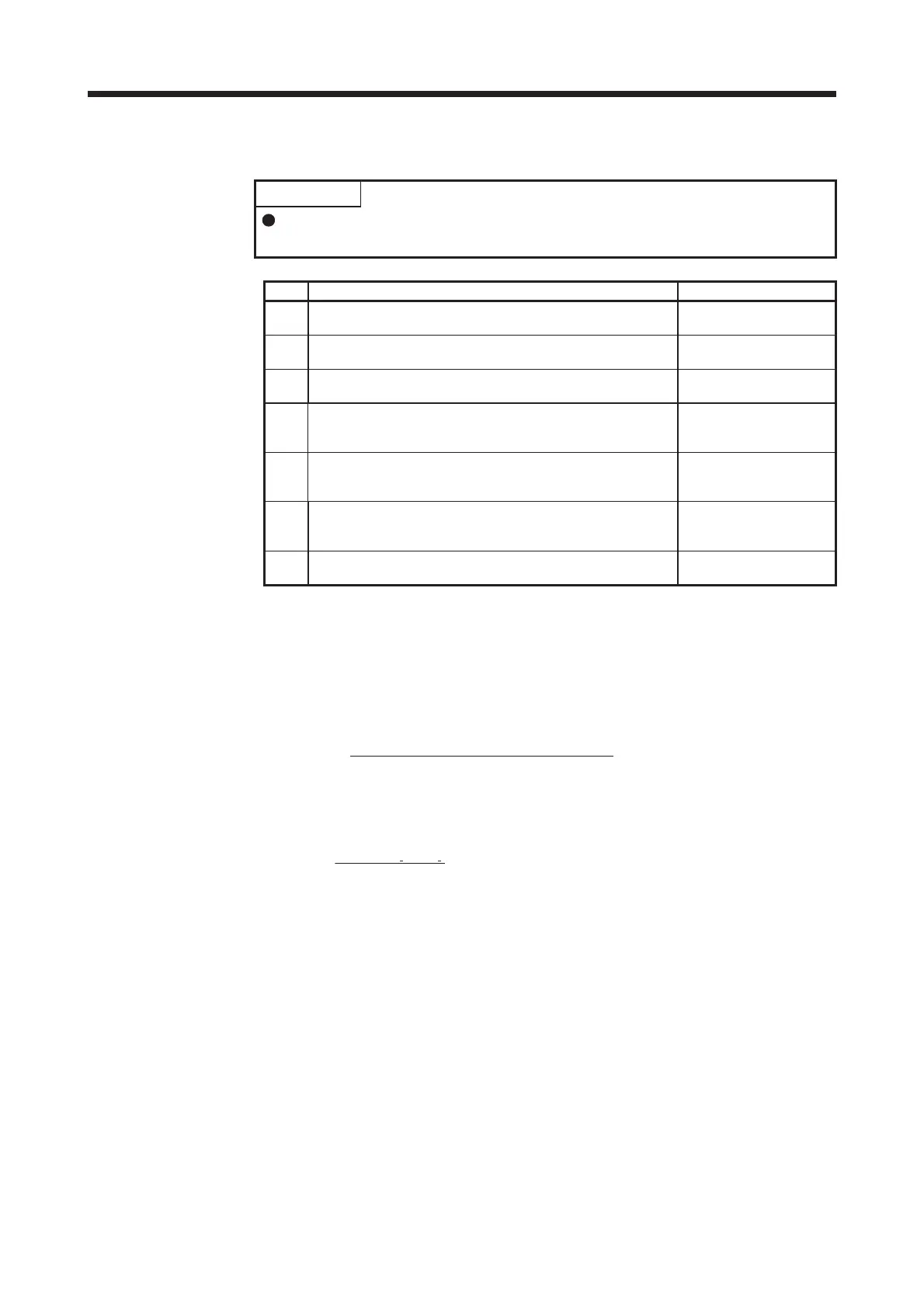
(3) Adjustment procedure of 2 gain adjustment mode
POINT
Set the same value in [Pr. PB07 Model loop gain] for the axis used in 2 gain
adjustment mode.
Step Operation Description
1 Set to the auto tuning mode.
Select the auto tuning
mode 1.
2
During operation, increase the response level setting value in [Pr.
PA09], and return the setting if vibration occurs.
Adjustment in auto tuning
mode 1.
3
Check
value of the model loop gain and the load to motor
inertia ratio in advance.
Check the upper setting
limits.
4
Set the 2 gain adjustment mode 1 ([Pr. PA08]: 0 0 0 0). Select the 2 gain
adjustment mode 1
(interpolation mode).
5
When the load to motor inertia ratio is different from the design
value, select the 2 gain adjustment mode 2 ([Pr. PA08]: 0 0 0 4)
and then set the load to motor inertia ratio manually in [Pr. PB06].
Check the load to motor
inertia ratio.
6
Set the model loop gain of all the axes to be interpolated to the
same value. At that time, adjust to the setting value of the axis,
which has the smallest model loop gain.
Set position loop gain.
7
Considering the interpolation characteristic and motor status,
fine-adjust the model loop gain and response level setting.
Fine adjustment
(4) Parameter adjustment
[Pr. PB07 Model loop gain]
This parameter determines the response level of the position control loop. Increasing the value improves
track ability to a position command, but a too high value will make overshoot liable to occur at settling.
The droop pulse value is determined by the following expression.
Number of droop pulses [pulse] =
ࡕ࠺࡞ᓮࠥࠗࡦ⸳ቯ୯
⟎ᜰᵄᢙ[pulse/s]
Position command frequency differs depending on the operation mode.
Position command frequency =
࿁ォㅦᐲ[r/min]
60
× Encoder resolution (number of pulses per servo motor
revolution)
Position command frequency [pulse/s]
Model loop gain setting
Speed [r/min]

 Loading...
Loading...







