5. HOW TO USE THE PROGRAM
5 - 41
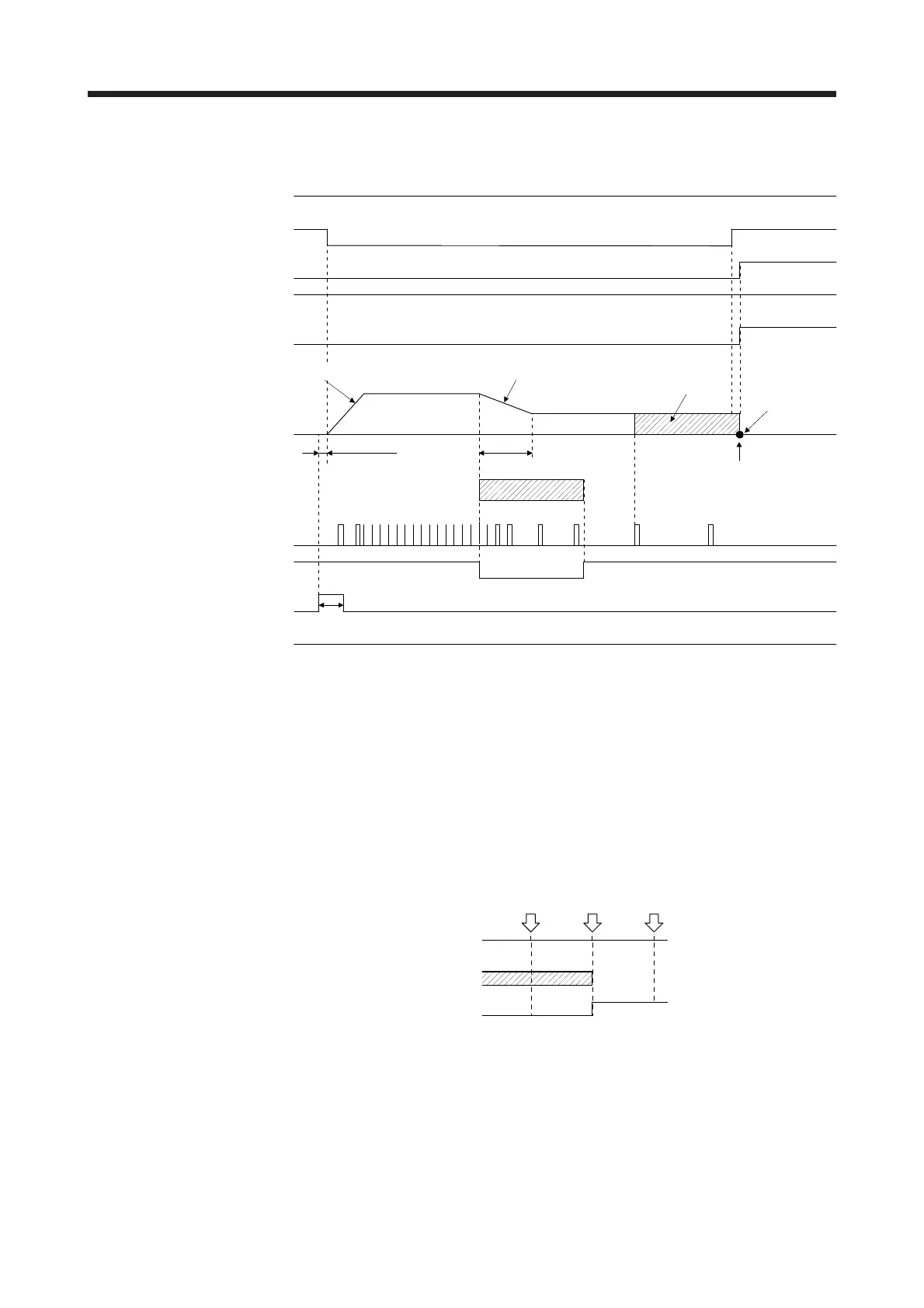
(3) Timing chart
The following shows a timing chart after a program containing a "ZRT" command is selected.
ON
OFF
MEND (Travel completion)
ON
OFF
ON
OFF
CPO (Rough match)
ON
OFF
Servo motor speed
MD0
(Operation mode selection 1)
ON
OFF
ON
OFF
Z-phase
DOG (Proximity dog)
ZP
(Home position return completion)
ON
OFF
ON
OFF
ON
OFF
ST1 (Forward rotation start)
ST2 (Reverse rotation start)
3 ms or shorter
Home position return speed
Deceleration time constant
Creep speed
Home position shift distance
Home position
Home position return position data
td
Proximity dog
5 ms or longer
Acceleration time constant
PED (Position end)
Reverse rotation
0 r/min
Forward rotation
The setting value of [Pr. PT08 Home position return position data] is used as the position address at the
home position return completion.
(4) Adjustment
For the dog type home position return, adjust the setting so that the Z-phase signal is always generated
during the detection of a dog. Make an adjustment so that the rear end of DOG (Proximity dog) is
positioned almost at the center between the positions specified by a Z-phase signal and the next Z-
phase signal.
The generation position of the Z-phase signal can be checked with "Position within one-revolution" of
"Status Display" on MR Configurator2.
Servo motor Z-phase
ON
OFF
DOG (Proximity dog)
Proximity
dog
0 Resolution/2 0

 Loading...
Loading...