1General configuration
Contents of the structural equipment
1-4
1.6 Contents of the structural equipment
1.6.1 Robot arm
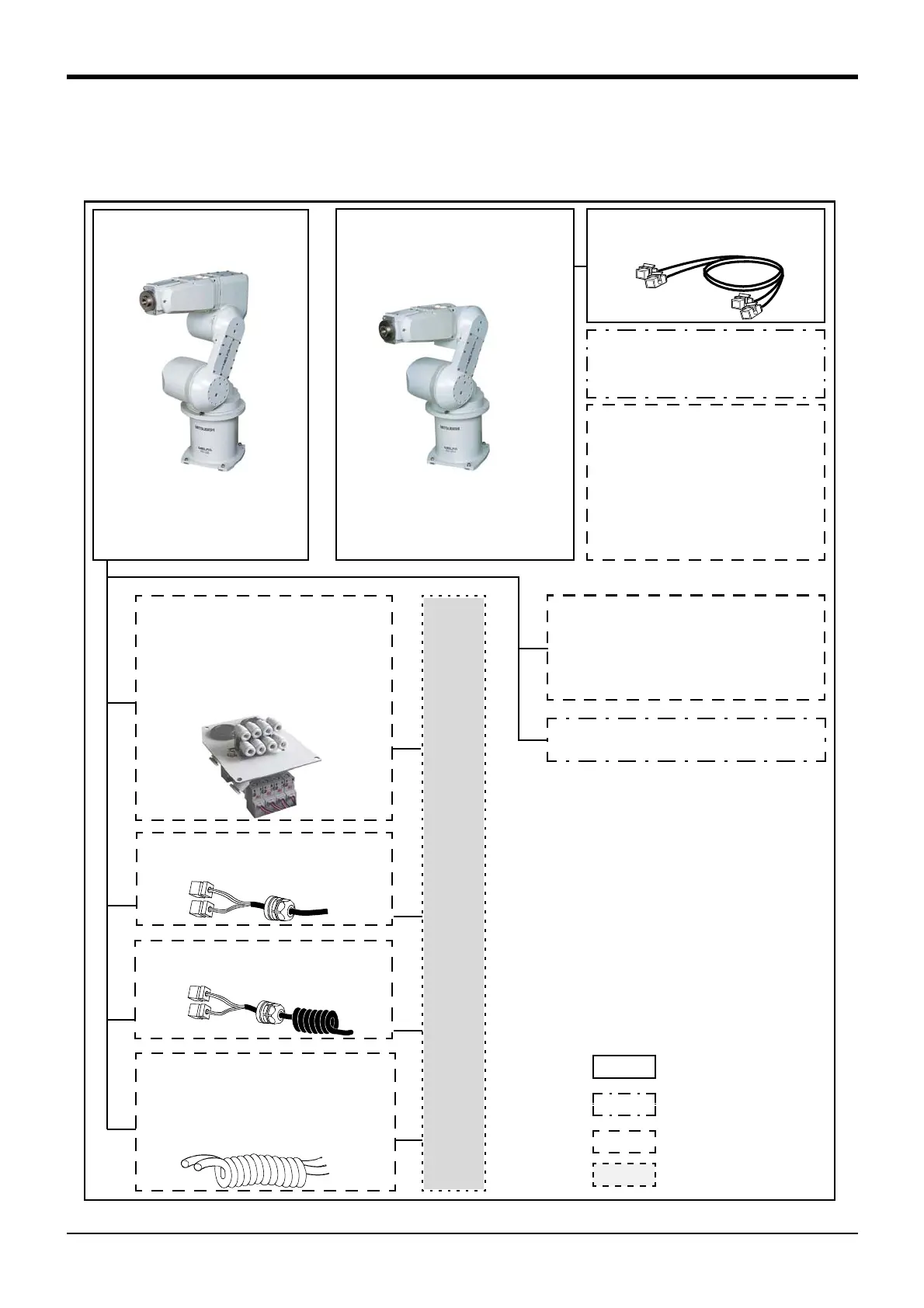
The list of structural equipment is shown in Fig. 1-1.
Fig.1-1 : Structural equipment (Robot arm)
Vertical five-axis
multiple-jointed type
RV-3SJ/3SJC
*Refer to Page 5, "2.1.1 Standard
specifications" for ditails on the
specifications.
Vertical six-axis
multiple-jointed type
RV-3S/3SC
*Refer to Page 5, "2.1.1 Standard
specifications" for ditails on the
specifications.
Hand output cable
・ 1S-GR35S-01 (4sets)
Hand input cable
・1S-HC25C-01
Machine cable extension
・
Fixed type: 1S- □□ CBL-03
・
Flexed type: 1S- □□ LCBL-03
Note1) □□ refer the length.
Refer to Table 1-3 for datails.
Note2) Extend by adding to the arm
side of the standard accessory
cable (for fastening).
Machine cable
(Fixed type: 5m)
Stopper for changing the operating range
of the J1 axis
・ Stopper part: 1S-DH-03
*This must be installed by the customer.
or
Machine cable
(Fixed type: 2m)
・ 1S-02UCBL-03
1) Specification with brakes for all axes
[Caution]
Standard configuration
Special shipping
Option
equipment
specifications
Prepared by customer
Pneumatic hand customer-manufactured parts
Solenoid valve set
(Hand output cable is attached)
<Sink type/Source type>
・ 1 set: 1S-VD01-02
・ 2 set: 1S-VD02-02
・ 3 set: 1S-VD03-02
・ 4 set: 1S-VD04-02
Hand curl tube
・ 1 set: 1E-ST0402C
・ 2 set: 1E-ST0404C
・ 3 set: 1E-ST0406C
・ 4 set: 1E-ST0408C
 Loading...
Loading...




